
伴随着现代科技的发展与创新,机器人技术早已经广泛应用于人类生活的各个领域,而能够研制出具有人类外观特征,并且能够使其进行行走动作是目前全世界许多学者的科研项目。
关于仿人双足步行机器人的研制始于上世界六十年代,到目前为止虽然已经有30年的历史。但是,仿人双足机器人的研究却在在短短的三十年中取得了极大的进展。目前国内外的许多学者正从事于研究这一领域这一领域,现如今双足不行机器人技术已经发展成了机器人技术领域的主要研究方向之一[2]。48014
1 国外仿人双足机器人的发展现状
关于机器人技术的研究,美国是全世界最早的对机器人进行研发的国家,虽然日本的机器人技术起步较晚,但日本巧妙地将半导体技术和机械技术相互结合,日本机器人研发后来居上,以致在机器人这一领域的研究超过了美国,位居世界首位。目前为止,全世界的机器人80%是日本制造的。1968年,在美国一台名叫“Rig”的操作型仿人双足步行机械由美国的R.Smoshr(通用电气公司)研制出来,由此揭开了主动仿人机器人的研制。
二十世纪七十年代初,加藤一郎教授实验室研制出了WL一5(见图1.1a)型双足步行机器人,该机器人采用液压驱动,其重量为130kg,高约0.9m,实际可承受可载荷约为30kg,运动步幅约为15cm。1984年,加藤加藤一郎教授等人又研制出了使用关节控制的WL一IORD仿人两足步行机器人,并且实现步幅为43.18cm的步行动作。1986年,加藤等人又研制成功了WL一12R两足步行机器人,机器人配置有的自由度高达8个之多:每条机械腿有三个前向的关节,躯体部分有正交方向上的两个关节自由度。可以实现步幅3Ocm的仿人模拟步行动作。
然而日本最据影响力的仿人双足机器人是 HONDA。1996年,日本HONDA公司公布了其历第二代HONDA仿人机器人P2(见图1.2a ),其身高为1820mm,宽度为600mm,体重为210kg,其自由度甚至高达30个,当时震惊了整个国际机器人学界。HONDA的P2机器人是世界上第一台无缆的及没有电缆的仿人双足多自由度机器人,它不仅能够实现行走运动,还能够完成上下楼梯运动论文网。1997年12月HONDA公司推出了P3型仿人两足步行机器人(见图 1.1b),该机型与P2型机器人基本相似,但是降低了高度和重量,并且使用了新型的镁金属材料[3]。也就是在2000年初,P2机型以及P3机型的缩小版 ASIMO(见图1.1c)问世,该机型身高约为1200mm,体宽大约为450mm,体重共约52kg,自由度多达26个,该机型不仅可以实现行走、爬楼梯以及识别多种声音等功能,还能够通过头部的传感器来识别各种手势运动以及之中不同的脸型。除了实现基本的行走之外,该机器人还能实现跑步功能,这是机器人技术研究的一次重大飞跃。为了完成这种运动,本田HONDA对双足机器人做了很大的修改,这样的改动对双足机器人跑步的控制起了很大的作用[4]。
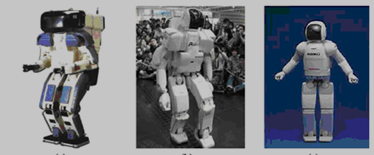
图1.1 HODON仿人机器人
2 国内仿人双足机器人的发展现状
我国的双足机器人的研究中,全国高校中国防科技大学最早研制出了双足仿人机器人。1988年2月国防科技大学研制成研制出了六关节的平面运动仿人双足步行机器人。本世纪初,国防科技大学研制了“先行者”(见图1.2)仿人双足步行机器人。“先行者”仿人机器人身高约为140cm,体重约为20kg,该机器人具备有符合仿生学的下肢和简化的上肢,其自由度多达15个。其基本能够实现身躯扭动、平地前进及后退、侧向行走、平地转弯等动作。上肢的手臂可以前向摆动,机器人头部可以转动,并具有一定的语言表达能力[5]。该双足步行仿人机器人的行走频率每秒为 2 步,并能够实现快速的动态步行,能够在小偏差、不确定环境中行走。但是我国的“先行者”虽然功能基本很完善却只能算是仿人双足机器人的初级阶段,原因是在动作方面距离实现类人型运动仍有较大的距离。 国内外仿人双足机器人发展研究现状:http://www.751com.cn/yanjiu/lunwen_50340.html