
气动机械手作为机械手的一种, 它具有动作迅速、重量轻、结构简单、可靠、平稳、不污染环境和节能等优点而被广泛应用[5][6]。现代气动机械手采用先进的阀岛技术和伺服控制技术[7],以模块化的方式装配,利用这些技术组成的机械手,完全可以实现电动伺服的机械手所有的功能[8]。29155
1 气动机械手机械结构
气动机械手结构包括机械臂,手腕和手爪。
按照机械手的运动方式,机械臂主要包括球坐标式、圆柱坐标式、直角坐标式和关节式[9],各个形式的优缺点如表1-2所示。机械臂的所有运动为直线运动,转动和摆动,这样对应直线气缸,转动气缸和摆动气缸,这些气缸加以一定的辅件按照一定的方式连接起来,就组成机械手。手腕的运动形式主要包括摆动和转动,也是通过摆动气缸和转动气缸来实现。手爪包括夹持式和吸附式,夹持式又可分为平移型和旋转型。旋转型结构简单,易于制造,价格较低,应用范围广;平移式结构复杂,但是能夹持不同直径的圆柱式零件。吸附式主要由架体、真空吸盘和真空发生器组件共同组成[10],主要用于吸附表面平整,粗糙度低的板块。论文网
表1.2 操作臂运动类型
运动类型 优点 缺点
直角坐标型 定位精度高,易控制 相对工件操作范围较小、灵活性比较差,所占空间体积较大
圆柱坐标型 相对工件操作范围较大、结构简单 手部外伸离中心轴愈远,其切向线位移分辨精度愈低
球坐标型 结构紧凑,所占空间尺寸小,有较大的动作范围 控制较为复杂
关节型 结构紧凑,所占空间体积小,相对工件操作范围较大 控制比较复杂,难以达到高精度,成本比较高
由于气动机械手由气动装置加以辅件拼装而成,所以出现了模块化拼装。德国 FESTO 公司开发了一套典型的模块化气动机械手,可组成立柱型气动机械手和门架型气动机械手,如图1.1和图1.2所示。这些这些模块化机械手动作灵活,组装方便,具有较高的定位精度[11]。人们按照工况的要求,选择适合的参数和功能的模块,进行随意的组合拼装,这种先进的设计思想,代表气动技术未来的发展方向,也将贯穿着气动机械手的发展及其实用性[12]。
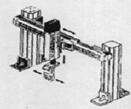
图1.1门架型气动机械手 图1.2立柱型气动机械手
马青华[13]设计的气动搬运机械手就采用圆柱坐标式,如图1.3所示,包括手腕回转、手臂伸缩、立柱回转、立柱升降四个动作。立柱回转和手腕回转都是通过转动气缸来实现;立柱升降通过升降气缸来实现,手臂伸缩通过伸缩气缸来实现。手腕选用单叶片回转气缸并与手臂和气爪相连。气爪采用旋转夹持式,通过齿轮齿条的配合将气缸的直线运动转换为旋转运动,从而控制手指的张开和闭合。这种机械手结构简单,动作迅速,但夹持功能有限,只能对特定位姿和形状的物件进行夹取。
1.3马青华设计的气动机械手机构装配图
王秋菊[14]设计的气动机械手关节式,有机架、大臂、手臂和手指组成,如图1.4所示,大臂包涵摆动和伸缩两个运动,都是由伸缩气缸来实现,手臂采用伸缩旋转组合缸,用来接近物体并保持正确的夹持姿态,手爪采用夹持型。这种机械手控制较为复杂,且该机械手只能在一个平面上进行运动,但操作的空间范围较广。 气动机械手发展研究现状:http://www.751com.cn/yanjiu/lunwen_24273.html