
由于传动链齿隙非线性因素对伺服系统的控制性能的高精度产生影响[3],因此多年来科研人员和过程人员研究在伺服系统的控制策略等方面进行了研究。包括多电机同步联动控制方法,齿隙、死区等非线性环节的补偿控制方法,消隙控制方法。65016
1多电机同步联动控制方法
(1)给定电压相同的并联同步控制[4]:
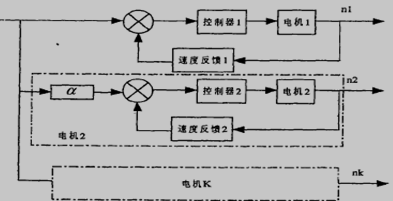
图1.1给定电压相同的并联同步控制
此方法事最简单的同步控制。在直流调速系统给定电压相同的情况下,通过同步系数a来协调电机之间的速度关系,其控制原理如图1.1所示,若为同步系统,则a=1。这种方缺点是采用的开环控制,若某一电机负载变化时将导致速度误差。优点是,简单,实现起来比较容易,速度滞后在启动时不会发生,跟随性能好。
(2)多电机通过内模控制同步运行[5]
图1.2多电机通过内模控制同步运行的系统结构图
如图1.2所示UR1代表功率放大器,ACR代表电流调节器,TG1代表测速电机SM1代表交流伺服电机,β表示速度反馈系数,α表示电流反馈系数,。速度环控制器采用内模控制。Gc(s)是内模控制器,G^(s)是速度环被控对象的内部模型。γ表示电流反馈系数,若为同步控制,则同步系数γ=1。论文网
2齿隙非线性环节控制补偿方法
(1)自适应算目的[6]:通过非线性补偿器进行补偿,基于间隙非线性系统建立自适应算法。
(2)BP神经网络非线性补偿算法[7]:对间隙特性进行,设计补偿器,对离线识别的结果进行非线性补偿。
(3)角差负反馈的方法[8]:齿隙非线性环节的影响通过引入反馈信号来消除,反馈信号由输出位置差与齿隙环节的输入进行线性组合而得。
(4)直接补偿算法[7]:主反馈信号用齿隙环节的输入信号用 (理想的不含间隙的负载轴位置)来取代齿隙环节的输出信号 (负载轴实际的位置),优点是能够消除极限环振荡,缺点是系统存在较大静差。
区别与联系,方法1和2目前在实际系统未应用,工程实际中的应用需要再在系统优化后才可。方法3和4来源于工程实际。
3伺服系统的控制策略
在控制系统设计中,常用的校正方式为串联校正,反馈校正,前馈校正和复合校正。如何选取校正方式,取决于系统中的信号性质,技术实现的方便性,抗干扰要求,环境使用条件等。一般来说,串联校正设计比反馈校正设计简单,也比较容易对信号进行各种必要形式的变换。一般来说,反馈校正尚可消除系统原有部分参数波动对系统性能的影响。在性能指标要求较高的控制系统设计中,常常兼用串联校正与反馈校正两种方式[9]。
伺服系统经发展过程中,具有代表性的控制策略为,复合控制、PID控制等。复合控制通过引入跟踪轨迹信号的一阶和二阶导数,可以在不影响系统稳定性的条件下提高系统精度。但许多伺服系统需要通过跟踪目标构成闭环,因此只能通过复杂的运算才能求得近似的复合控制信号。
PID控制在工业和武器装备中得到了广泛的应用,PID控制的优点:原理简单,使用方便;适应性强;鲁棒性强,其控制品质对被控对象的变化不太敏感,非常适用于环境恶劣的工业生产现场;PID算法有一套完整的参数整定与设计方法,易于被工程技术人员掌握;许多工业回路中对控制快速性和控制精度要求不是很高,而更重视系统的可靠性时,使用PID控制能获得较高的性价比;长期应用过程中,对PID算法缺陷可以进行改良。P控制器进行校正时,它实质上只是一个具有可调增益的放大器,在信号变化过程中,P控制器进行校正只改变信号的大小而不影响其相位。在串联校正中,加大控制增益K,可以提高系统的开环增益,减小系统稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统部稳定。PD控制器进行校正时,能反应输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,从而改善系统的稳定性。微分控制只对系统的动态观察期作用,而对稳态过程没有影响。PI 可提高系统的型别,消除或减小系统的稳态误差,改善稳态性能,当积分时间T足够大时,PI控制器对系统稳定性的不利影响大为下降。PID在低频积分I提高系统的稳定性能,在高频段微分D提高系统的动态性能。因此,应用PID设计校正伺服电机更加合理[10]。 高性能伺服系统的研究现状:http://www.751com.cn/yanjiu/lunwen_72474.html