
国外研究现状早在上世纪六十年代一些学者就开始了对仿蛇机器人的研究,至今已有50多年的历史。在此期间由日本的Hirose教授在1972年完成了世界上第一台蛇形机器人的研制工作,Hirose首次从生物学的角度对蛇进行研究,并且通过摄像法归纳总结出曲率以正弦变化的蜿蜒运动步态[1-3],他研制了第一台通过内力实现其前进的蛇形机器人样机Active Cord Mechanism Model 3(ACM III),如图1-1所示。之后又开发了ACM系列样机,其中ACM-2采用了差动驱动技术,完成了蛇形机器人二维运动到三维运动的过渡,在此基础上完成了ACM-3的研制工作,它几乎能完成生物蛇的所有运动方式如:侧向运动、螺旋运动、蜿蜒运动、直线运动等。ACM系列的蛇形机器人最大的特点是采用较大的被动轮代替鳞片的作用。49092
挪威Kristin Y. Pettersen教授[4]以及其团队开发出了以气动驱动为基础的蛇形机器人,如图1-1所示,该机器人一共由六个相同的模块组成,每个模块由一个空心圆柱和一个气动盘组成,模块之间通过两自由度关节连接,该蛇形机器人不仅可以完成平面运动,还能完成空间的三维运动。H.Schumann—olsen教授和他的同伴在自制Aiko样机的基础上,对蛇形机器人进行自适应控制和避障算法的研究,取得了重大的成果,在他们制定的自适应控制算法下Aiko样机能够在充满障碍物的地面上前进,能够自动规划相对最佳的行进轨迹。Aiko样机在结构上最大的特点是关节之间通过万向节进行连接。
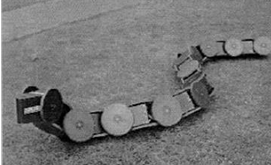
图1-1 ACM蛇形机器人(左)和气动机器人(右)
Alessandro Crespi教授和它的团队[5]开发出了水陆两用蛇形机器人,如图1-2所示,该蛇形机器人既能够在陆地上完成蛇的相关运动,同时还能够在水中像水蛇一样在水中游动前进。该机最大的特点是在控制算法上采用了CPG控制算法。
美国的Amir Shapiro教授[6]和日本的Tetsushi Kamegawa教授对蛇的攀爬能力进行了大量研究,美国Amir Shapiro教授不仅从理论上完成了对蛇形机器人进行攀爬运动的建模,而且做出了实际的样机完成了在狭窄空间里的攀爬运动,如图1-2所示。
水陆两用蛇形机器人(左)和攀爬蛇形机器人(右)
国内研究现状
相比之下,国内在蛇形机器人的研究方面起步比较晚。上海交通大学崔显世论文网,颜国正于1999年3月开发研制了我国第一台微小型仿蛇机器人样机[7-9]。该样机仅仅通过若干刚性连杆串联而成,每个关节由步进电机来控制,用滚动轴承来模拟鳞片各向异性的作用。在此样机的基础上运在此样机的基础上运用脊梁曲线建立了蛇形运动曲线,比较系统的讨论和模拟了蛇的基本运动方式。
国防科技大学周旭升等也研制了自己的样机,如图1-3所示,该机器人蛇体由十
国防科大蛇形机器人
七节组成,每节用环形的金属片做支撑,主体电机安装在金属支架上,每一节的电机转轴通过摆杆与相邻的环节相连,并且留有安装电池的位置,此外,还介绍了机器人的控制体系以及软件系统,该机器人通过遥控的方式可以在地面以及水面上柔顺地蜿前进。它的执行单元在结构上仿制了日本Hirose的机器蛇结构,在身体下端装有从动轮以减小身体与地面之间的摩擦,但执行单元只能采用平行连接方式,电机轴线相互 平行因此只能完成平面内的螺旋运动,无法进行更深入的研究,这也是它的最大缺点。
中科院沈阳自动化所[10-13]也在机器人开放实验中研制出蛇形机器人,另外陈丽等还提出了提出一种新型的可重构蛇形机器人机构,该机构能使蛇形机器人实现了蜿蜒运动,蠕动,侧向运动及翻滚运动。 蛇形机器人的国内外研究现状:http://www.751com.cn/yanjiu/lunwen_51927.html