
世界各国对平台控制精度要求越来越高,对高精密定位技术的实现给予很大重视,故科学家们也都进行了深入的研究。目前,国外精密平台实现方面,美国、日本、德国在平台技术方面遥遥领先,国内在平台技术上,南京航空航天大学、哈尔滨工业大学等在研究及实现上处于领先地位。25724
定位平台的有多种分类方,本文从定位精度、位移分辨率、可以实现的行程大小及响应速度方面将以往的平台分为:精密微动台、宏微结合大行程精密运动平台、直接驱动大行程精密运动平台三种[5],下面予以概述
(1)精密微动台
若要达到纳米级的定位精度,仅利用传统的电磁电机是非常困难的,所以国内外的学者进行了多方面的尝试,利用压电作动器、音圈电机等尝试实现纳米级的定位精度。其中,利用叠层压电陶瓷的静变形结合柔性铰链等新型导向技术可以在较小的行程范围内实现极高的位移分辨率,通常行程为微米级,而位移分辨率可以达到几个纳米[6]。结合 PC机实现闭环控制,定位精度可以达到 10~100nm。论文网
精密微动台在国内外都有很多学者在研究,目前开发出了一些可用于商业化的产品。如图 1.1 所示,在 2005 年韩国科学技术研究中心设计了以音圈电机为驱动单元,柔性铰链为支撑结构的一文微动机构,实现了 0.5nm的定位精度[7]。图 1.3.是美国 nPoint 公司的高精度纳米定位平台,可在微、纳米的行程范围内,快速实现纳米级精度的精确定位,可以方便地连接为三自由度运动平台,并在 X、Y、Z 三个方向上实现 0.1~1nm 的位移分辨,但其行程最大只有约 400μm[8]。
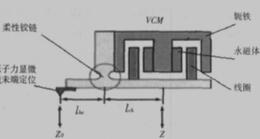
图1.1 原子力显微镜Z向定位示意图 图1.2 德国PI公司三自由度压电微动平台
图1.3美国nPoint公司压电微动台 图1.4压电作动器驱动两自由度微动台
(2)宏微结合大行程精密运动平台
上述微动台虽然可以达到很高的位移分辨率,但由于行程太小只有几百微米,对于IC加工、精密医疗等应用场合的微动台就难以满足要求,这就需要行程可达几百毫米的大行程精密运动平台。
图1.5 德国PI公司宏伟结合运动平台 图1.6伺服电机与超声电机混合驱动
图1.5为 PI 公司的宏微结合单自由度运动平台[9],这种精密运动平台的典型结构,在传统的伺服电机或者直流电机上加上滚珠丝杠实现长行程的粗定位,然后由非共振式的压电作动器、音圈电机或其它微执行机构实现微米范围内的位置补偿。此平台标称行程为 200mm,定位精度为 10nm,最大运行速度达到 100mm/s[10]。图1.6即为美国北卡罗莱纳大学利用伺服直线电机研制的宏微两级精密定位装置,它的精密定位过程由两部分来完成,由直线伺服电机实现粗定位,然后由直线超声电机进行精确定位,定位误差不超过 50nm[11]。
如前所述,宏微结合的形式是大行程精密运动平台常用的方式,但这样的平台系统非常复杂,传动链较长,很难统一宏平台和微平台所需要的分辨率。采用宏微结合形式并不是最好的选择,如果不采用这种方法就能实现大行程、纳米级的运动精度,将是最好的方法。
(3) 直接驱动大行程精密运动平台 国内外定位平台技术研究现状:http://www.751com.cn/yanjiu/lunwen_19637.html