
国内文献综述某兵器水下运动半实物仿真模拟器的结构如图1所示,该水下运动模拟器由运动平台、固定平台、液压缸和固定支撑杆等部分组成。固定支撑杆与固定平台固连,与运动平台的运动副为虎克铰。三组液压缸驱动元件与运动平台运动副为球铰,与固定平台运动副为虎克铰。通过三个伺服液压缸的精确控制,来实现运动平台的运动,从而完成应当的运动方式。67744
该电液位置伺服系统作为该水下运动模拟器的驱动元件,具有以下特点:
1)长期工作于水下
该电液位置伺服系统作为水下运动模拟器的重要组成部分,由于长期在水下工作,良好的水下密封性以及防锈蚀能力是系统正常工作的基本保证。需要考虑以下几个方面:液
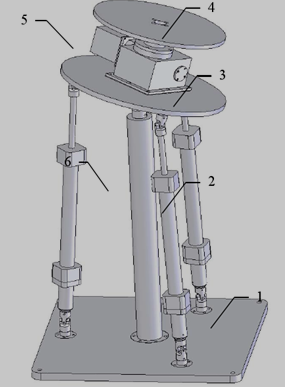
图1 新型三自由度串并联机器人平台结构
压缸的防水密封、伺服阀以及伺服放大器的防水密封、液压钢的防锈蚀、传动机构的防锈蚀等。
2)较长的液压管路
由于整个机构工作在水下,液压源在岸上放置,高压油液通过较长的液压管路输送给三个伺服液压缸。在电液伺服系统中,液压管道较长会引起液压冲击、系统滞后等不利影响。
该电液位置伺服系统的控制方案采取上下位机的控制方式,其总体结构如图2所示,该系统主要分为水上和水下两大部分,水上部分由水上控制柜和液压源组成,水下部分由水下控制柜和水下执行机构组成。
图2总体结构示意图
该电液位置伺服系统的控制方案的工作原理如图3,电液位置伺服系统的各组成部分,如液压缸、工业控制计算机、伺服阀、位移传感器、液压源等组成方式如图3所示。该系统以工业控制计算机作为上位机,DSP作为下位机,这两部分组成系统控制器,系统控制器和伺服阀、伺服放大器、液压源、伺服液压缸、位移传感器等一起组成电液位置伺服系统。上位机位于水上控制柜内,主要完成系统的轨迹规划,并且通过CAN总线与下位机DSP进行通讯以获取位移传感器的位置信息,计算并转换为位置指令,并将该指令通过CAN总线传递给下位DSP机控制板。下位机DSP控制板位于水下控制柜内,一方面将位置传感器的位置信息反馈给工业控制计算机,另一方面将接收工业控制计算机给出的位置指令信号对伺服液压缸进行控制。位移传感器安装在液压缸内部,以利于防水密封,是伺服液压缸的反馈检测元件,用于检测伺服液压缸实际位置。伺服放大器安装在水下控制柜内,用于将下位机DSP控制板发出的电压指令转化为电流信号,并利用该电流驱动伺服阀
图3电液位置伺服系统控制原理图论文网
系统功能:系统分为水上和水下两个部分,主要目的是将执行元件和辅助元件分开,简化两者之间的连接(水下部分要考虑防水的因素),并且能保证系统的精度和响应速度的要求,满足系统功能。
2国外文献综述
电液伺服三轴仪加载系统的的核心是液压伺服系统,其工作原理如图4所示,液压伺服加载系统主要由液压站、伺服放大器、伺服阀、对称伺服液压缸、高精度传感器(力和位移)、高进度AD/DA 卡和计算机组成。其中上位机主要承担数据显示和数据存储。下位机负责控制算法的运算、加载信号的输出。控制系统流程为:期望值(位移、力)是输入量,实际值(位移、力)是输出量。在外界干扰下,由传感器测得实际(位
移、力)信号,经A/D转换后输入下位机,在下位机中与输入期望值(位移、力)相比较得到误差值。经下位机运算产生控制指令,然后在D/A 转换成电压信号输出给伺服阀的伺服放大器,控制伺服阀阀芯的开口大小,由此控制液压油进入对称液压缸的进给油量推动活塞和活塞杆的移动,以达到控制液压缸活塞杆的期望(位移、力)目标。即在控制过程中,用误差信号作为控制量以控制电液伺服阀的开口大小。此系统的位移控制精度为35μm/50mm。 水下运动模拟器文献综述和参考文献:http://www.751com.cn/wenxian/lunwen_76049.html