
第二章图像获取利用超眼摄像机通过比较选定合适的焦距进行拍摄,对拍摄区域也进行比较选择。
第三章图像预处理对图像进行灰度化和锐化处理,灰度化对输入彩色图像进行灰度处理,图像增强主要是在灰度处理基础上,在频域中利用巴特沃斯高通滤波器处理,得到二值化图像。
第四章图像处理模型采用了连通域算法和灰度共生矩阵模型,连通域算法是基于巴特沃斯高通滤波后的二值化图片;灰度共生矩阵仅需图片灰度化处理。对灰度共生矩阵模型得到的特征参数数值,采用了k近邻算法和基于遗传算法优化的BP神经网络进行数据处理。将上述两种模型的三种算法进行了杂糅处理,消除判定的随机性和提高判断的正确率,建立了组合模型,以前面三种算法的正确率作为权值,大大减少了产生误判的概率。
第五章蚕茧自动分拣系统提出了一种基于表面皱缩纹理图像特征识别的蚕茧自动分拣系统的初步方案,给出了系统方案示意图。
2 蚕茧表面图像获取
2.1 图像获取装置
图像获取是纹理提取的第一步,图像是对纹理提取的最直观的表达,获取图像的好坏直接影响到整个课题的进度。基于纹理图像的获取[5],会主要考虑设备的以下几点:
(1)设备能获取蚕茧纹理较为清晰的图像,最好可以与PC机相连,这样方便图像的传输和后续处理;
(2)设备有变焦的功能,这样对于同一蚕茧可以远近焦拍好几张不同的照片,可以得到区分上绵茧的最适合的焦距;
(3)拍摄设备自带光源,可以在不同的场合对蚕茧补光,最好可以改变光强、改变入射光的角度和方向。
(4)需考察拍摄装置的适用温度、相对湿度、拍摄像素等物理参数需满足拍摄要求。
本课题中选择超眼显微摄像机(Supereyes,以下简称超眼),可以充分的满足上述几点的要求,并且性价比较高,超眼的三文图如图2.1,实物如图2.2。
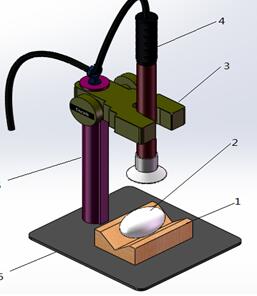
图2.1 超眼三文图 图2.2 超眼实物图
1-V型块,2-蚕茧,3-升降台,4-摄像头,5-导轨,6-底座
超眼是由底座、导轨、升降台、摄像体四部分构成的,其中升降台与导轨之间是通过齿轮齿条连接的,在升降台内部有个小的齿轮,旋转两侧的旋钮可以使得升降台上下移动,摄像体的下方是摄像头,上方的旋钮可以变焦,且有一条电缆线可以直接连接到电脑的USB的接口,在超眼的驱动程序中可以在计算机窗口中实时的预览,在电缆线中还有个调节光强的旋钮,给拍摄带来了较大的方便。
蚕茧是近似于椭球状的,放在底座中会出现放不平,位置不固定,受周围环境影响较大,为了克服这个问题,加了个V型块固定在底座上,V型块有较高的形位公差,其中心要正对摄像头,两边须与底座的两边平行,这样对于每个蚕茧都取同样的拍摄区域,仅考虑上、绵茧性质对纹理的影响,排除蚕茧不同区域的影响。在实际中,由于底座钢板较薄,V型块尺寸较小且材料又是木材,为了不破坏两者强度,在确定了V型块的位置时,利用强力双面胶粘了上去。
2.2 拍摄条件选择
在实际拍摄条件下,需要调整焦距、光强、入射光角度,才可以拍出纹理清晰的图片。
焦距选择:焦距可以用拍摄对焦后的物距间接来反映[6],分别对物距u=1mm,10mm,25mm三种情况下进行了拍摄。对于同一组焦距一定时,放上蚕茧后,由于蚕茧的大小不同,所需拍摄蚕茧的上表面中心离摄像头的高度不同,此时图片较模糊,为了解决这个问题,此时焦距保持不变,将升降台上下的调节,当图像最清楚时拍下图片,由于焦距是固定的,图像最清晰时摄像头与蚕茧上表面的距离是恒定的,为物距的大小。就图片的质量来说,u=25mm时,如下图2.3,图2.4,焦距较大,会拍摄到蚕茧之外的V型块,拍摄图片有效性降低,而且上绵茧图片的纹理较为不清晰;u=10mm时,如图2.5,图2.6,蚕茧完全占据了图像,但由于蚕茧本身是带有球状弧度的,使得对于远离拍摄中心处的蚕茧表面的对焦效果不好,图像较为模糊;u=1mm时,如图2.7,图2.8,由于超眼摄像头离蚕茧表面较为近,中心处的曲率半径很大,可以近似看做平面,拍摄的效果较好,具体的所有图片在三种物距下拍摄的图片见附件。 基于缩皱纹理的绵蚕识别技术研究+MATLAB程序(3):http://www.751com.cn/jixie/lunwen_19647.html