
3 自抗扰技术 12
3.1传统PID控制及其缺陷 12
3.2自抗扰控制器的提出 13
4肌肉-手臂-机械臂系统的ADRC控制器设计 20
4.1 系统结构设计 20
4.2 ADRC控制器参数整定 20
4.3 ADRC控制器仿真 21
4.4 ADRC与PID控制器的比较 22
结论 25
致谢 26
参考文献 27
1 绪论
1.1 课题背景
现代社会中,脑中风已经严重威胁中老年人身体健康,并且发病率正在逐年上升。这种疾病造成了患者肢体运动功能的丧失和相关并发症,很大程度上影响了患者日常生活的能力。目前临床上对偏瘫患者的康复治疗多采用医师对患者一对一的物理治疗,此类方法不仅费时费力还缺少客观量化的评价。随着机器人技术的发展,机器人医疗渐渐成为一种重要且有效的治疗手段。机器人技术在医疗康复领域的应用,不仅提高了病人康复的科学性和针对性,使得病人更好更快地康复,而且还会缓解紧张的医师资源。[1]
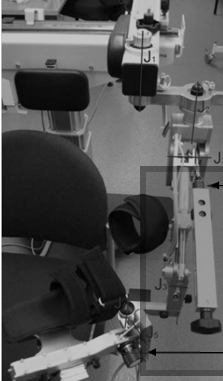
图1 Armeo康复机器人
针对现有康复机器人的种种不足,英国南安普敦大学的Freeman C. T.博士所领导科研小组设计了一种新型上肢康复机器人Armeo[2],如图1所示。以人体上肢解剖学为理论依据,该机器人的设计采用外骨骼式结构,各关节的自由度符合人体上肢各关节自由度分配情况,并从患者的实际应用出发,设定了上肢运动最重要最基本的5个自由度:肩部屈/伸、肩部外展/内收、肘部屈/伸、腕部屈/伸和腕部旋内/旋外(对应图中J1、J2、J3、J4、J5五个关节),并结合机器人结构及训练要求设定各个自由度活动范围。这种机器人由于关节多、非线性程度较高,所以系统比较复杂,传统的PID控制器难以有效控制,亟需一个新的控制策略来代替PID控制。
1.2 突破性的创新—自抗扰技术
1.2.1 PID技术的优势与劣势
PID控制技术在工业生产控制领域长期占据着主导地位。目前,PID 控制器在航天控制、运动控制及其他过程控制的领域中仍然占据 95%以上[9]。由此可见,尽管最新的现代控制理论所给出的控制方法其理论上是多么完美,仍然难以大规模应用在现代的工业控制领域。这反映了目前普遍存在的控制理论和实践脱钩的现象,这要求我们多总结规律,从PID技术中汲取养分,突破创新,探索新的技术。
韩京清研究员概括出PID控制技术的如下四个方面的缺陷[3]:
a) 直接以 的误差取法不合理。系统输入信号 常常是不光滑、不连续的,常常产生跳变,而输出信号通常是光滑的,不可能跳变,要求让缓变的变量 来跟踪能够跳变的变量 ,本身就不合理。
b) 产生误差信号 的微分信号 没有太好的办法。现场微分信号的实现通常采用差分或超前网络,这种方式对会放大噪声,使微分信号失真;
c) 误差信号采用的线性组合不一定最合适。PID控制器给出的控制量 是误差的现在e(t)、误差的过去 和误差的将来 三者的加权和,是三者的线性组合。大量工程实践表明,三者的线性组合不一定是最好的组合方式,不易解决快速性和超调的矛盾; 康复医疗机器人Armeo系统自抗扰控制应用研究(2):http://www.751com.cn/zidonghua/lunwen_74011.html