
(3)智能机器人
此类机器人它不仅具有感官能力,而且具有独立判断和行动的能力,还具有记忆、推理和决策的能力,所以能完成更加复杂的动作。智能机器人在发生故障时,可以通过故障检测装置找到故障部位,并自我修复[8]。
随着社会和经济的发展,如今的科学技术已是突飞猛进,离进入下一个机器人时代——生物机器人时代,已不远了。目前机器人已往特殊机器人发展,因为不同的环境有不同的参数,对机器人的功能和技术等各项指标有特定的要求,以便更好地完成工作。在当今这个时代,管道无处不在,在工业生产、日常生活中,给予我们极大的方便[9],但是一旦出现故障,带来的损失有时也是巨大的,所以我们需要管道机器人来帮助我们管理维护管道,管道机器人也受到了国内外高度关注。
1.3 管道机器人的研究现状
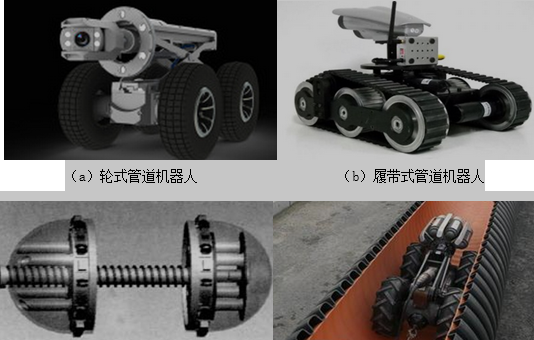
管道机器人根据其移动的机制不同大概可以分为轮式管道机器人、履带式管道机器人、蠕动式管道机器人和液压驱动管道机器人等几种类型。轮式管道机器人应用最为广泛,这种管道机器人结构简单,速度快且平稳连续,效率高还易于控制。履带式管道机器人增加了机器人与管壁的摩擦,提高了机器人在管道内越过障碍物的能力。蠕动式管道机器人体积很小,一般适合小口径管道[10]。液压驱动管道机器人功率大,尺寸较大,适合大口径管道。图1.1展示了这几种管道机器人模型。
管道机器人的研究始于20世纪40年代,70年代第三次工业,石油工业急速发展,这就极大地推动了管道机器人的发展进程。以日本、美国为代表的一些国家开始研究一些能完成复杂工程项目的高效管道机器人,取得了不错的成果。到了21世纪初,随着纳米材料、传感器技术、人工智能还有计算机等方面的进步,微型管道机器人得到了极大地发展,不仅满足了工业中一些特殊环境的操作,还能进入人体血管进行检测与治疗。这也使医学界更进一步,解决了以前很多无法解决的难题。美国哥伦比亚大学科学家研制出一种由DNA分子构成的“纳米蜘蛛”微型机器人[11],只有4纳米长,能跟随DNA的运动轨迹自由的行走、转向和停止,这类机器人可以帮助人类识别并杀死癌细胞。文献综述
国内在管道机器人方面的研究起步较晚,但是随着经济发展的要求,国内对管道机器人的研究也是突飞猛进。目前国内的管道机器人技术日趋成熟,有些领域已经可以产业化和商业化,但是毕竟起步晚,在精度跟稳定性上离国外还有一定的差距。
(a)轮式管道机器人 (b)履带式管道机器人
(c)蠕动式管道机器人 (d)液压驱动管道机器人
图1.1 几种主要的管道机器人模型
1.4 本课题的研究途径及论文结构
随着我国城市建设的快速发展,城市供热基础建设也得到快速发展,但随之而来的问题是北方城市现有供热管网的维护工作量巨大,且定期检测技术相对落后,为此需要开发一种能适应多口径供热管网的管道检测机器人,以降低供热管网的日常维护劳动强度,提高供热管网定期检测的技术水平。本课题旨在开发一类能适应多口径供热管网的智能管道检测机器人,该机器人具有自主行走和定位、能携带多种检测负载、具有遥管道检测远程控制与检测、视频图像无线输等功能。本课题需要完成以下任务: MSP430F149供热管道机器人的控制系统设计(3):http://www.751com.cn/zidonghua/lunwen_72871.html