
2 三相异步电机的矢量控制策略
2.1 矢量控制的基本原理
所谓矢量控制就是将静止坐标系上表示的电动机矢量关系变换到以气隙磁场、定子磁场或者转子磁场定向的旋转坐标轴系上,达到对电机转矩的实时控制的目的。由于转子磁场定向的矢量控制方法简单易行,解耦方便,控制精度较好,本文的工作就是于转子磁场定向的。交流电机三相定子电流 、 、 ,经过由三相静止坐标系到两相静止坐标系变换得到 、 ,然后 、 再由两相静止坐标系到两相旋转坐标系变换,并使d轴沿着转子磁链的方向,得到交流电机励磁电流分量 和转矩电流分量 ,分别等效于直流电动机的励磁电流和转矩电流。这样通过控制 和 ,就可以按照直流电动机的控制方法来控制交流电动机。矢量控制基本原理如图2.1所示。
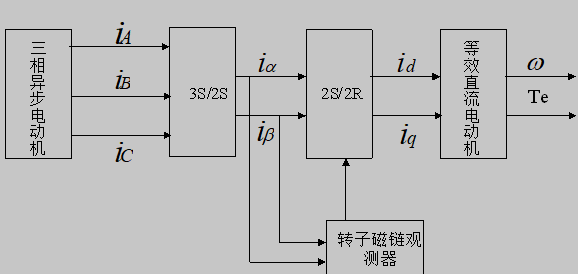
图2.1 矢量控制原理框图
2.2 矢量控制的坐标变换
为了便于组成控制系统,对异步电动机采用矢量变换控制,需要把A-B-C三相坐标系的交流量先变换成 两相坐标系的交流量,然后再变换成以转子磁场定向的d-q直角坐标系的直流量。另外,在控制调节过程中,还需要分析两相坐标系下的电压、电流和磁通,确定幅值的相位和大小。矢量控制系统的坐标变换包括静止坐标系间的变换、旋转与静止坐标系间的变换以及直角坐标系与极坐标系之间的变换。
2.2.1 Clark变换
Clark变换指的是三相静止坐标系变换为二相静止坐标系(3S/2S变换),三相静止坐标系A-B-C和二相静止坐标系 之间的变换
Matlab异步电机矢量控制系统设计(4):http://www.751com.cn/zidonghua/lunwen_61450.html