
上世纪 90 年代,Ybando 教授将气动执行元件、可编程控制器和相应传感器组合,并编 写 PLC 程序,制作了一部勘探机器人,这台机器人能够进入人类不能接近的区域,比如狭小 空间、有毒有害物质分布区域内进行环境侦查[9]。70138
国内蒋晓静等人研制了一套气动输送工作站,该机械手有 4 个自由度,可在 PLC 程序控 制下实现空间内搬运工件的功能[10]。
气动输送系统发展趋势:
(1)智能化:在气动输送系统中,广泛使用气缸、气动手指、气动马达、真空吸盘等元 器件组合体,与电磁阀、可编程控制器或单片机组合,通过计算机编程得以实现生产智能化。
(2)抗干扰能力强:在易燃、易爆、有毒、强放射性、强电磁干扰等环境中依然能够稳 定工作。论文网
(3)机械机构模块化、标准化:利用标准化元件可以很容易地对气动输送系统进行功能 扩展或替换。图 1.2 为自动输送系统气动回路最基本的组件[11]。
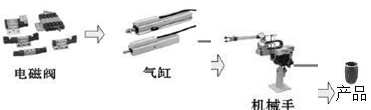
图 1.2 气动输送系统组织结构
(4)长寿命、自诊断特性:气动系统若在运行过程中突然失效,很可能造成严重的人员 伤亡和经济损失,因此气动系统的自诊断及寿命预测功能显得尤为重要,有了这一功能,设 备维护人员可以方便地了解当前设备状态并安排合适的维修保养计划,落实生产安排[12]
参 考 文 献
[1] 王建军.气动搬运机械手的设计与研究[J].机械管理开发,2010,(05):24-26..
[2] 陶海斌,倪俊芳.气动机械手自动搬运控制系统的设计[J].电工电气,2013,(01): 49-52.
[3] 王 登 贵 , 杨 艳 . 四 自 由 度 气 动 搬 运 机 械 手 控 制 系 统 研 究 与 仿 真 [J]. 液 压 与 气 动 , 2014,(09):29-31.
[4] 祝红军,张春元.防爆气动搬运系统方案设计[J].液压与气动,2015,(03): 120-123.
[5] 左建民.液压与气压传动[M].北京:机械工业出版社,2011.
[6] 孙振燕.气动搬运机械手的机械结构设计思考[J].装备制造技术,2014,(03): 126-127.
[7] 李海标,宁雄,赖显渺.自动生产线精确传输机械手控制系统设计[J].液压与气动, 2013,(02):17-19.
[8] 马青华.气动搬运机械手的机械结构设计[J].机械管理开发,2013,(03): 26-27.
[9] 黄超.危险品气动搬运系统研制[D].西安:西安科技大学,2008.04.
[10] 张新娟.基于PLC和气动技术的自动输送系统设计[J].机电工程技术, 2013,(01):57-60. [11] 李昶利.全钢子午线轮胎码垛搬运机械手的研究[D].青岛:青岛科技大学,2014.04. [12] 王海叶.轻型气动平动搬运机械手设计[J].机械制造与自动化.2010,08,39(4):167-178. [13] 李超.气动通用上下料机械手的研究与开发[D].陕西:陕西科技大学,2008.05.
[14] 张诗.穴盘苗移栽机械手的结构设计与仿真研究[D].沈阳:沈阳农业大学,2007.05. [15] Bernhard Klaassen,Ralf Linnemann. Biomimetic walking robot SCORPION: Control and
modeling[J]. Robotics and autonomous systems, 2002, 41(2- 3):69- 76.
[16] Yi Peng. Research for the clamping force control of pneumatic manipulator based on the mixed sensitivity method[J]. Procedia Engineering,2012,(01),7-8.
[17] SMC中国有限公司.SMC产品总目录[Z].北京:SMC(中国)有限公司.2015 气动输送技术研究现状与参考文献:http://www.751com.cn/yanjiu/lunwen_79321.html