
瑞典ABB公司制造的“ IRB5400-12”喷涂机器人(图1.1所示),具有6个自由度,工作时关节轴的最大转速137o/S,末端定位精度0.15mm,其性能特点是喷涂精确、工作域大、负载能力强且运行可靠性高。日本FANUC公司制造的“M-10iA”工业机器人(图1.2所示),工作半径1420mm,重复精度士0.8mm,主要用途包括搬运、弧焊、机床上下料等。 65018
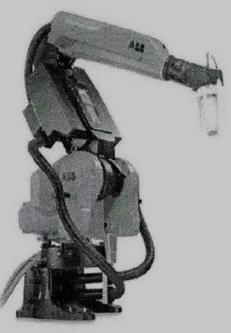
图1-1 IRB“5400-12”喷漆机器人 图1-2 “M-10iA”工业机器人
日本松下公司和IRT研究院((Information and Robotics Technology)联合研制的“KAR”洗碗机辅助机器人(图1.3所示),它的机械臂杆上安装了18个高级传感器,机械手爪配备了最新防滑材料,能够牢牢抓住碗和碟,防止物体的意外跌落。如图1.4所示,是“KAR”机器人正在完成洗碗工作。论文网
图1-3 “KAR”洗碗机辅助机器人
图1-4 “KAR”机器人正在完成洗碗动作
由于传统的刚性机械臂基座过于粗壮,臂杆较短,操作空间较为有限,灵活性较差,越来越难以满足高精密行业以及现代自动化生产越来越高的使用要求。柔性机械臂以其载重/自重比高、结构轻、响应快速、操作灵活、能耗低的优点,逐渐在制造业、航天工业等领域中占据了越来越重要的地位[3]。
柔性机械臂研究现状:http://www.751com.cn/yanjiu/lunwen_72478.html