
随着管道网络建设的飞速发展,油气管道的安全运行问题则是人们必须深入考虑的问题。管道的安全检测收到社会各界的重视,于是各种管道检测技术快速发展起来[1]。利用管道机器人对管道内部进行检测是目前比较通行的一种方式。管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统[2]。目前国内外管道机器人的研究成果已经很多。管道机器人的驱动源大致有以下几种:微型电机、压电驱动、形状记忆合金、气动驱动、磁致伸缩驱动、电磁转换驱动等。管道机器人按照驱动方式大致可以分为自驱动、利用流体推力、通过弹性杆外加推力[3-6]。64881
自驱动管道机器人包括轮式、脚式、爬行式、蠕动式和履带式等。日本学者福田敏男、细贝英夫在1986年研制了可以通过“L”无圆弧过渡的管内移动机器人。该机器人行走机构分别由头部和本体两部分组成,头部和本体可相对回转。当机器人在直管内行走时,本体上的电动机M1通过减速装置带动本体上的驱动轮转动,使机器人沿直管行走[7]。当通过90度弯管时,电动机M2驱动头部做姿态调整,同时驱动头部履带,引导机器人通过弯管。该机器人的技术指标为:适应管径:∮50mm;行走速度:8.1mm/s;转弯性能:论文网可以通过90度直角弯管。西门子公司Werner Neubauer等人研制的管道机器人有4、6、8支脚三种类型,可在各种类型的管道里移动,其基本原理是利用腿推压管壁来支撑个体,多腿可以方便的在各种形状的弯管内部移动,如下图所示:
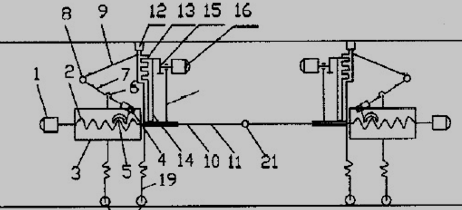
图1.1 脚式机器人结构图
1:电机 2:螺杆 3:支架 4:拔销 5:螺母 6:销 7:拔杆 9:支撑杆 10:筒体 11:套筒 12:脚靴 13:滑杆 14:平面螺纹 15:小齿轮 16:电机 21:万向节
国内的太原理工大学也成功的研制出了内脚式行走机器人,该机器人可在管道内双向行走,自动随管道弯度转向[8]。除此之外,上海交通大学研发了小口径的管道内蠕动式移动机构,如图所示:
利用空气压力的蠕动式机器人
它是模仿昆虫在地面上爬行是蠕动前进与后退的动作设计的。其主要机构有撑脚机构、气缸、软轴、弹簧片、法兰盘等
国内外管道机器人的研究现状:http://www.751com.cn/yanjiu/lunwen_72275.html