
仿生学夹持装置灵活有效的末端夹持器是机器人多指灵巧手研究的一个重要方向。由于传统刚性夹持器存在驱动系统复杂、机构尺寸较大、效率低、柔性差等缺点, 国内外研究人员把目光转移到了气动技术和仿生学上来[1]。60942
地球上的生物以其多彩多姿的形态、灵巧机敏的动作活跃于自然界。海葵学名:Actiniaria),六放珊瑚亚纲的一目。海葵的单体呈圆柱状,柱体开口端为口盘、封闭端为基盘。口盘中央为口,口部周围有充分伸展的软而美丽的花瓣状触手,犹如生机勃勃向日葵,因而得名。触手的数目因种而异,但内环者大于外环,数目均为6的倍数,具有摄食、保卫和运动的功能。附着端的基盘,可分泌腺体吸附于石块、贝壳、海藻或木桩等硬物上。口盘的直径大多为几厘米,但栖息于北太平洋沿岸和澳大利亚大堡礁的巨型海葵口盘直径可达1.5米之巨[2]。
本课题拟模仿海葵的结构特点,在抓取手臂的端口布置真空吸取装置和触手式辅助夹持装置。在材料方面通过对文献的对比研究,气动人工肌肉在机器人领域的应用研究得到了广泛的关注。
在本课题的研究中,我们尝试把人工肌肉和真空吸取装置有机的结合起来,气动人工肌肉是一种新型的气动橡胶驱动器, 它具有输出力大、重量轻、柔顺性好等特点。气动人工肌肉作为一种新型的气动执行器(或驱动器),由于动作灵活、结构简单、易于控制、功率/重量比大、可以直接驱动等优点[3]。使得海葵式多功能吸盘能对不同大小,不同形状,不同质地的物品进行有效夹取,使它的应用范围更广,可靠性更高。论文网
2 真空吸取技术
在吸着方面,本课题拟利用真空吸附装置。真空压力为动力源, 作为实现自动化的一种手段, 已经在工业设备中得到广泛应用。我们通过对文献的整理研究,真空吸取技术对海葵式多功能吸取装置十分适用。
真 空 吸 取 技 术 是 一 项 非 常 易 于 掌 握 的 传 送 技 术 和非 常 可 靠的 辅 助 技 术 , 利 用真 空 技 术 进 行 调 节 , 控 制 和 监 控 , 可 以 有 效 的提 高 工 作 零 部 件 在 自 动 化 、 半 自 动 化 和 手 动 工 作 状态 下 的 包 装 、 运输 效 率 , 对 于 薄 而表 面 光 滑 的 各 种 金 属 制 品 以 及 纸 张 , 玻 璃 , 塑 料及胶合板等非金属制品适用[4],而 在实际生产当中利用真空压力为动力源, 作为实现自动化的一种手段, 已在工业设备中得到广泛应用,图1.1所示使用真空发生器的回路图。
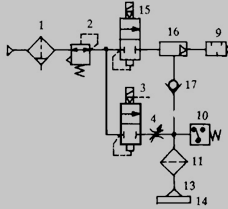
图1.1. 使用真空发生器的真空回路图
真空发生器的形状如图1.2真空发生器形状所示。图1.3列出某真空发生器的技术参数。真空吸取器的喉管部直径直接关系到该处流量大小,从而影响到真空度的大小,是关键参数之一。真空发生器装置简单,安装拆卸方便,在类似本课题中的中小型真空吸盘装置中运用广泛。
仿生学夹持装置真空吸取技术国内外研究现状:http://www.751com.cn/yanjiu/lunwen_66518.html