
国外学者很早就致力于研究鱼类的推进模式及水下仿生鱼机器人。美国是最早开展研究水下仿生机器人领域的国家之一,1994年麻省理工大学(MTI)研究小组成功研制出了世界上第一条真正意义上的仿生金枪鱼(Rob0Tuna)。它是以克服水下潜水器的连续工作时间短为目的来实现快速、高效的推进系统,它能通过摆动尾柄和尾鳍像鱼一样在水中游动,最高游动速度可达每秒两米。1995年通过RoboTuna的改进而研制成RoboPike。它以研究鱼机动性和静止状态下的加速性为目的,以螺旋形玻璃纤维弹簧制成骨架,这种结构具有良好的柔性,使其能有足够的强度来抗拒游动时的撞击和承受住水压。52524
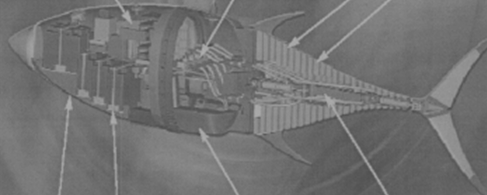
MIT和DRAPER实验室合作研制的仿生鱼VCUUV
1998年MTI和DRAPER实验室合作推出了最高版仿生鱼VCUUV (Vortieity Contorl Unmanned Undewrater Vehiele),它是以黄鳍机器金枪鱼仿制的,如图1.1所示。VCUUV具有良好的机动性、方向稳定性、减阻性、深度保持能力和更高的加/减速性能。
在日本,90年代初,名古屋大学对仿生鱼水下推进装置进行了研究。省船舶运输技术研究所开始了实验水下仿生机器鱼的研究。为高速游动研究而设计出PF-700,如图1.2所示, 为研究直线推进运动而设计出PF-600,如图1.3所示, 为能得到高性能实验平台而设计出UPF-2001,如图1.4所示, 为了研究快速下潜运动而设计出PF-550,如图1.5, 为了研究沉浮运动方式而设计出PF-200,如图1.6所示, 为了研究转弯性能而设计出PF-300,如图1.7,在UPF-2001的基础上,研制出的PPF-09具有实现上升下潜的三维运动的功能。
机器鱼PF-600 图1.4 机器鱼UPF-2001
机器鱼PF一550
机器鱼PF-300
1999年,德州农工大学宇航工程系的工作人员应用SMA驱动技术制成了一种带脊椎的水下潜器。SMA不仅可以控制力和力矩,还能产生推进力。SMA驱动技术是由几种模式的SMA组成的,根据SMA的运行方式不同,通过波动合成来实现不同形态的鳗鱼仿生身体波动,从而产生推进力,实现仿生鱼在水中的游动。
.2 国内研究发展概况
国内对有关仿生鱼的研究是从二十一世纪初开始的。目前,论文网国内学者对对仿生鱼的研究还不是很多,在鱼类的游动原理方面探讨较少,主要针对国外以成型的较为全面的实验平台上进行研究。
哈尔滨工程大学在国家科学机构的帮助下,正在进行水下机器人的理论与实际研究,主要的研究对象是鲹科鱼类的新月型尾鳍推进模式。以蓝鳍金枪鱼为原型,研制出了仿生-I机器鱼如图1.8所示。其原地回转半径为4m,于2003年10月进行了海上实验,仿生-I机器鱼经受住了海上恶劣条件的考验。
哈尔滨工程大学研制的仿生-I号机器鱼
国内其他科研单位主要对鳗鲡鱼类的游动模式进行研究,北航机器人研究所于1998年研制出了(图1.9(a)),2003年研制出了SPC-n机器鱼(图1.9(b)),并进行了水中试验。
北航机器人研究所研制出的仿生鱼
中国科学院在多方单位的共同支持下,进行了仿生鱼单个运行和群体协作运行的研究,经过长时间的尝试和研究, 研制出了游龙系列机器鱼
仿生鱼国内外研究现状概况:http://www.751com.cn/yanjiu/lunwen_56421.html