
国外研究现状法国[2]Besancon自动化实验室研制了一种可以在直径为 管道内移动的微型管内机器人,结构如图1-1所示。机器人采用形状记忆合金(SMA,Shape Memory Alloy)驱动,在直管中移动速度为 。这种结构的缺点是驱动移动速度比较低,牵引力也不足。43625
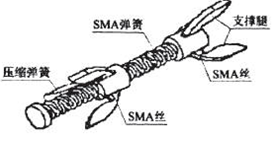
图1-1 SMA驱动的微小机器人
法国[2]Anthierens等人研制的适用于内径为 管道的蠕动机器人,该微管道机器人如图1-2所示,它由两部分组成:其中一个是支持体,另一个是伸长体。该蠕动式微机器人的前进是靠后面的活塞系统利用气压来驱动三条腿产生移动,而机器人是如何攀附在官道上的则是由前面的丝杠螺母旋转而实现的。驱动器是金属波纹管。微机器人最大移动速度为 ,负载可达 。这种微机器人有很高的运动精度( ),负载大,但是运动速度较慢且结构复杂。
蠕动式微机器人Inchworm
基于蚯蚓院里的微管道机器人[3]:
1994年,日本东京工业大学的lwao Hayashi等根据蚯蚓蠕动原理开发出了一种蠕动式管道微机器人,如图1-3所示。它采用气压来驱动柔性微执行器(FMA,Flexible MicroActuator),整个机器人由三节单元组成,每一单元由一个FMA和四个铰链组成。FMA采用橡胶驱动器来实现驱动,采用压缩气体提供动力,按照一定的控制规律使三节单元协调动作能够实现微机器人在直径为 管内的灵活移动,移动速度为 ,最大牵引力 ,这种结构的缺点是牵引力和移动速度都不高。
仿蚯蚓微机器人的单元结构与运动原理
再例如日本东京工业大学研制的气压蠕动式爬行装置,速度较慢,控制系统较为复杂,难以实现精确控制。并且,其研制的电机外置式螺旋移动装置,速度较快,但管外辅助装备复杂。
2 国内研究现状
(1)西安交通大学[4]以电致伸缩陶瓷微位移器做驱动器,电磁铁机构做可吸附于行走表面的保持器,设计制作了蠕动式微动直线自行走机构如图1-4。由簧片组3与左右支架1、6联接成一体,作为电致伸缩陶瓷微位移器4的载体,驱动器4的一端与支架1的侧面贴和,另一端与螺钉5的端面贴合。螺钉5为细牙螺纹,转动调节螺钉5,可对簧片组3施加必要的预紧力,并保证驱动器4的两侧面与承载体间无间隙接触。
自行走机构简图
(2)清华大学[2]研制了一套小型蠕动机器人系统,其机构如图1-5,由蠕动体和电机伸缩微位移器组成。蠕动体的蠕动变形形态由粘贴于柔性铰链部位的电阻应变实时感,机器人的外形尺寸为 ,重 ,最大步距 ,行程 ,运动精度 。
蠕动体结构示意图
其中:1、3——蠕动体 2、4——电机伸缩机构
(3)哈尔冰工业大学[5]研制开发了一种蠕动式管内移动机器人机构。图1-6为蠕动式管内移动机构的模型图。该机构由蠕动丝杠1、螺母2、前后支撑足3、4,前后封闭弹簧7、8组成。在图中需要向左行走时,分别使左右支撑足上端与管壁接触,下端用滚轮与管壁接触。驱动蠕动丝杠依次左转和右转, 使螺母在丝杠上左右移动(即实现机器人的蠕动)。当机构需要往前运动时,丝杠左转以实现机构向前滑行;当机构需要往后运动时,丝杠右转以实现机构往后滑行。
蠕动体结构图
(4)石油大学[3]仿照蚯蚓在孔内蠕动的过程,研制了一种在孔内行走的机器人驱动装置。该机器人如图1-7 所示,由蠕动进给装置1、SMA 胀紧环2、转向装置3、工作电极4 和限位元件5 等部分组成。动作过程如下:前SMA胀紧环通电膨胀压紧孔壁,然后SMA 拉伸螺旋弹簧通电收缩,偏压弹簧压缩,整个装置向前收缩。 蠕动式管道机器人研究现状:http://www.751com.cn/yanjiu/lunwen_44544.html