
迎宾机器人国外研究现状日本作为人口老龄化问题最严重的国家,其服务型机器人的发展一直处于国际领先的地位。日本机器人种类丰富,服务机器人功能已经十分丰富和强大,索尼公司2003年推出的QRIO(Quest for Curiosity)仿人型机器人是一款娱乐与服务机器人如图1.1。全身共有38个关节,除了具有唱歌、跳舞、踢球等功能外,还具有跑步功能。“跑”的概念是指在快速行走时会有短暂的时间是两只脚都离开地面的状态,因此制作可以跑步的双足机器人非常困难[3]。而QRIO作为世界第一台会跑的机器人,在快速行走的状态下能够保持20ms不与地面接触[4]。QRIO机器人头部有三个摄像头,它可以通过声音或者脸部特点来对人进行识别。它的手抓十分灵活,可以进行抓球、投篮等复杂的动作。33737
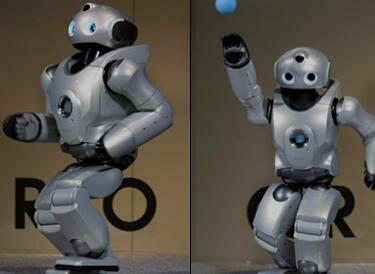
图1.1 QRIO机器人
由本田公司投入大量心血研发的双足类人型机器人ASIMO(Advanced Step Innovative Mobility)以超乎想象的人类功能震惊了世界[5]。ASIMO高约一米三,体重约为四十八公斤,全身多达57个自由度,整体的造型十分像穿着机器人服装的男孩如图1.2。从2000年的第一代ASIMO发展至第三代,ASIMO的功能已经十分完善。它的行走速度最高可达到9km/h,并且具有极强的平衡能力,在快速转弯时他能改变自己身体的倾斜角度来使自己不摔倒[6]。ASIMO不仅具有语音控制功能,还能够与人进行交流、握手,并且手部十分灵活,拥有五个手指,能够拧瓶盖,倒水,送咖啡。因此ASIMO被许多大企业,如IBM公司(International Business Machines Corporation)租用作接待员。论文网
德国作为工业强国,其服务机器人的发展十分迅速。慕尼黑工业大学研制的LOLA服务机器人如图1.3,高约1.8m,具有极强避障能力,能够搬运重物,行走速度最高可达5km/h[7]。仿造人体结构设计出的LOLA机器人,共计25个自由度,走路十分稳定,与人类行走方式极为相似。
2 迎宾机器人国内研究现状
国内服务机器人发展起步较晚,发展速度较慢,与发达国家存在着较大的差距。近年来,随着国家高技术研究发展计划(863计划)的实施,国内服务型机器人发展有了重大的突破[8]。我国最早的机器人是哈尔滨工业大学1985年研发的HIT仿人型机器人如图1.4,它能够完成步行、上坡等基本动作[9]。二十世纪初由国防科技大学开发的类人型服务机器人“先行者”为我国最早的服务机器人如图1.5。先行者具有一定的语言能力,能识别到靠近的人并与其打招呼,行走速度约为每秒两步[10]。
HIT机器人 先行者机器人
南京理工大学研发的迎宾机器人“飞飞”是国内现有较为先进的迎宾机器人如图1.6。它具有语音对话、按照特定路线行驶、避障、讲解、唱歌等功能。它能够自主迎宾,为客人介绍当地的历史故事和文化习俗,目前较多的应用在科技馆和企业的迎宾中。 2010年以上海世界博览会吉祥物为原型研发的“海宝机器人”如图1.7,具有回答问题、迎宾导游、交流、为客人拍摄照片、唱歌跳舞等功能,海宝机器人能还在互动中变换脸部表情,十分可爱。 迎宾机器人国内外研究现状:http://www.751com.cn/yanjiu/lunwen_30994.html