
14
2.3.5 机械手2升降气缸的选型 15
3机械结构设计 18
3.1 机械手1设计中的关键技术 18
3.2 机械手2设计中的关键技术 20
3.3 冲压装置设计中的关键技术 22
3.4 零件自动装配生产线结构总成 24
4 自动装配生产线PLC控制设计 26
4.1 PLC特点 26
4.2 PLC的工作原理 27
4.3硬件选型 27
4.4 PLC的接线 27
4.5 控制流程图 29
4.6 自动装配生产线系统PLC控制程序 30
结 论 31
致 谢 32
参 考 文 献 33
附 录 34
1 绪论
1.1 课题研究背景、目的及意义
机械手是在自动装配生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置[1-3]。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合[4-5]。机械手能部分地代替人工操作;能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;能制作必要的机具进行焊接和装配从而大大改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐[6-7]。在此背景下,开展气动控制技术在自动装配生产线中的应用研究,对提高装配行业的生产效率和产品质量具有重要意义[8]。论文网
1.2 国内外对于自动装配生产线的发展现状
1.2.1机械手的定义
所谓机械手是能模仿人手和臂的某些动作功能,按照人设置好的固定程序来抓取、搬运物件或操作工具的自动操作装置[8]。它可以代替人在恶劣的环境下工作,同时可以大幅度的提高生产效率,机械手广泛应用于机械制造加工行业。
机械手可分为专用机械手和通用机械手两大类。专用机械手:它作为整机的附属部分,动作简单,工作对象单一,具有固定(有时可调)程序,使用大批量的自动生产。如自动生产线上的上料机械手,自动换刀机械手,装配焊接机械手等装置。通用机械手:它是一种具有独立的控制系统、程序可变、动作灵活多样的机械手。它适用于可变换生产品种的中小批量自动化生产。它的工作范围大,定位精度高,通用性强,广泛应用于柔性自动线。
1.2.2 机械手的系统工作原理
机械手的系统工作原理框图如图1.1所示:
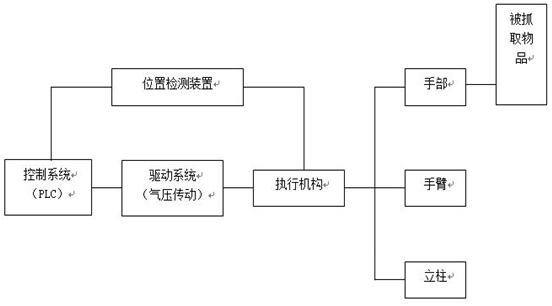
图1.1 机械手的系统工作原理框图
机械手的工作原理:机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。在PLC程序控制的条件下,采用气压传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有一定速度和时间的动作。同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。位置检测装置随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置。 PLC零件自动装配生产线结构设计+梯形图(2):http://www.751com.cn/jixie/lunwen_76823.html