
1.3 自动焊锡系统的主体研究内容以及研究计划
1.3.1 自动焊锡系统的主体研究内容
本课题所设计的主要内容如下
(1)自动焊锡系统总体方案的设计;
(2)自动点焊机机架和工作台的设计;
(3)自动点焊机送丝机构的设计;
(4)总体装配结构的运动仿真设计。
1.3.2 自动焊锡系统的设计计划
依据本课题的自动焊锡系统的设计要求,对本设计制定了以下设计计划,包括
(1)利用三维制图软件Pro/engineer建立自动焊锡系统的模型建立;
(2)通过修改完善三维模型来制定自动焊锡系统的总体方案,并生成相应的总装配图;
(3)利用三维制图软件对自动点焊机机架和工作台以及送丝机构进行设计,并生成相应的零件图;
(4)利用三维制图软件Pro/engineer总体装配结构的运动仿真;
(5)为自动焊锡系统进行运行代码编程,并进行相关的焊接实验。
2.1 自动焊锡系统机械结构的总结构设计
自动焊锡系统机械机构主要包括几大部分,分别是X,Y,Z轴的机架,工作台,还有焊枪组件和出丝机构等。经过设计计算以及利用Pro/engineer完成最终装配体。
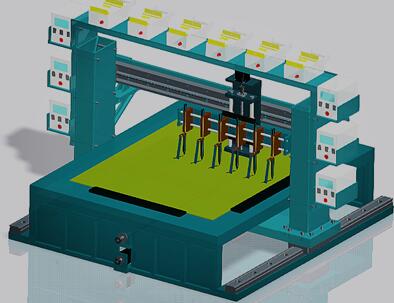
图2.1 自动焊锡系统的总装配图
2.2 自动焊锡系统的X,Y,Z轴的机械机构设计
已知条件:
Z轴负载物体重量 =43.6KG=436N,X轴零件重量负载为86.35kg,Y轴零件重量负载为734.01kg,Z轴的最大行程 =284mm,X轴最大行程 =1620mm,
Y轴最大行程 =1640mm,快速进给速度均为 =10m/min,定位精度为20um/300mm,全行程25um,重复定位精度为10um,要求寿命为20000小时
2.2.1 X,Y,Z轴滚珠丝杠基本设计数据计算
1)导程计算
-工作台最高移动速度
-电机最高转速;
i -传动比
电机与丝杠间采用联轴器连接,i=1
由已知条件得 =10m/min,
初步设定电机最高转速 =2000r/min
代入公式算得 0.005m
初查《滚珠丝杠设计与选型》取 5mm
因X,Y,Z三轴要求移动速度一致,因此导程初查值一致,均为 5mm
2)确定当量转速与当量载荷
(1)工作情况下
丝杠转速
已知 =10m/min, =5mm,i=1
X,Y,Z三轴参数一致,结果相同
(2)当量转速计算
当量转速 /100+ /100+ /100+ /100
t-工作时间比例
已知 2000r/min, =100%
数据代入得 1667*100/100=2000r/min
X,Y,Z三轴参数一致,结果相同
(3)当量载荷计算
来!自~751论-文|网www.751com.cn
Z轴:
X轴:
Y轴
由已知条件代入公式得到
X轴 Y轴 Z轴
127N 1079N 436N
127N 1079N 436N
3)初选滚珠丝杠副
由动载荷计算公式知
自动焊锡系统的设计自动焊锡机器人的机械结构设计(3):http://www.751com.cn/jixie/lunwen_76802.html