
1.2.1 国外研究现状
1.2.2 国内研究现状
1.3 论文结构及内容
本文着重研究了气动船控制系统的设计与仿真,文章各章节的安排如下:
第一章:本章简要介绍了本课题的研究背景和意义,并回顾了水面无人艇的发展概况;
第二章:本章介绍了本文研究对象水面气动船的结构和控制方式;
第三章:本章首先通过对行进过程中的气动船进行受力分析,建立了气动船的运动模型,然后分析了外界可能存在的干扰,并根据上述分析设计程序计算出控制气动船按预期路径行进的最佳控制信号;
第四章:本章进行了气动船运行过程中的控制系统,采用PID算法对气动船进行控制;
第五章:本章对设计的算法和系统进行仿真工作,并进行了结果比对;
最后,在结论里对本文完成的工作进行总结并对未来工作进行展望。
2 水面气动船的现状与介绍
水面气动船的示意图如图2.1.1所示,船体由热成型ABS塑料压制而成,采用新型无舵转向系统,推进与转向系统由安装在船尾甲板上的驱动风扇和舵机组成,通过控制风扇的转速和转角来实现船体的前进和转向。气动船由风扇进行驱动,风扇的转速大小决定了驱动力的大小,间接决定了船速的大小,通过控制风扇的角度来进行船的转向工作。两个电机的控制信号由控制系统计算后送给单片机,最后由单片机输出。而对控制信号的计算需要一些特定的参数,如船的当前状态和预定的目标位置等,这些信息主要由船载智能手机上的GPS定位系统和指南针来获取运行状态得到并返回给计算机进行处理和计算。
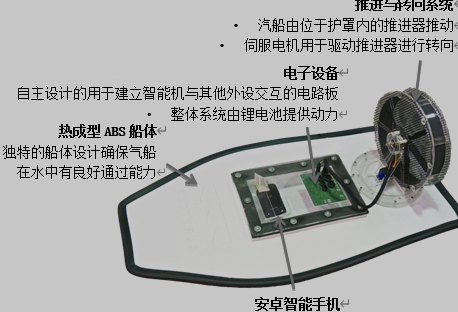
图2.1.1 水面气动船总体结构示意图
现阶段该气动船具有检测精度低、延迟大、无法控制船体连续运行速度等问题。本系统旨在通过建立气动船的动态模型和船速控制的数学模型,考虑运行的自然环境,设计出可靠的控制系统,通过动态调整风扇转速和风扇角度来实现对气动船速度的监测和控制,以便船只能够平稳运行并为水质监测等活动提供良好的监测环境。
3 气动船数学模型的建立:
在对气动船的控制系统进行设计之前,必须首先建立该气动船的运动数学模型以及环境干扰数学模型,在此基础上对气动船进行仿真实验和控制系统的设计。这是相当重要的一个环节,因为若是在实体船上进行所有的实验,将会耗费相当大的人力物力和财力。通常解决此问题的做法是以建立的真实船舶的数学模型为基础,利用计算机进行仿真来对控制算法的性能进行研究。但是由于实际情况下,船舶的系统是相当复杂的,想要建立非常精确的船舶的数学模型是较为困难的,所以在实际研究中,通常的做法是建立一个能满足设计的控制系统需求的数学模型即可。
本节将针对气动船的运动特点,建立相应的船舶运动数学模型,并对模型的推导过程进行了详细的阐述和说明,为之后的控制系统设计提供支持。
建立所需要的坐标系,是对气动船的运动特性进行分析之前必须要做的工作。而在研究是通常采用船坐标系和世界坐标系,两坐标系的示意图如下所示:
图3.1.1 气动船运动的两种坐标系
在世界坐标系中,将气动船视为一个刚体,运用质心运动的动量及动力矩定理,可以得出气动船的运动方程如下: 水面气动船速度控制的建模与实现+程序(3):http://www.751com.cn/zidonghua/lunwen_76795.html