
图1.1 重复控制系统框图
⑸ 滑模变结构控制(Sliding mode variable control)
滑模变结构是利用开关控制规则来使得被控系统的状态到达预期的滑动面(超平面)上“滑动”。它的优点是对参数的变化以及外部干扰的不敏感性,即鲁棒性;特别适应于在负载变化下的功率变换系统的闭环控制中。电力电子变换其本质上为非线性系统,由于滑模变结构控制理论为非线性控制理论,因此滑模变结构控制在电力电子变换器领域的应用得到了广泛的研究。早期的逆变电源的滑模控制多采用模拟控制技术,这存在控制硬件电路特别复杂,控制功能弱的特点。但随着上世纪八十年代离散滑模技术的研究,离散滑模控制策略在电力电子变换器方面的研究得到了国外学者的关注,并发表了相应的文章,国内学者对离散滑模控制应用在电力电子变换器上的研究还是很少,因此有必要对其进行研究。
⑹ 模糊控制(Fuzzy Control)和神经网络控制(Neural Network Control)
模糊控制和神经网络控制都是智能控制方式,模糊控制器有着以下优点:具有较强的鲁棒性和自适应性,模糊控制器的设计不需要被控对象的精确数学模型;查找模糊控制表占用处理器的时间很少,因而可以采用较高采样率来补偿模糊规则的偏差。但模糊变量的分档和模糊规则数都受到一定的限制,隶属函数的确定带有一定的人为因素,因此模糊控制的精度有待于进一步提高。神经网络控制是模仿人的大脑实现对系统的控制,它的最大优点是不仅适应于线性系统,而且对非线性系统也适用,而大多数的系统(包括逆变电源系统)或多或少都带有非线性因素。神经网络控制规律的获得不依赖于系统模型,而且学习实例包含了各种情况,因此系统的鲁棒性特别强,适用于各种负载的情况。但是由于学习情况比较复杂,目前该方法还处于实验室阶段。
1.4 课题研究的内容
数字化是逆变电源发展的主要方向,,其具有很多优点:数字控制易于采用先进的控制方法和控制策略,使得逆变电源的智能化程度更高,性能更加完美。控制灵活,升级方便。控制系统的可靠性更高、易于标准化、系统维护方、性能好。
本文先介绍传统的PID控制方法,并对其进行仿真。然后将将模糊PID 控制策略引入逆变电源控制, 介绍控制方法,模糊推理, 实现对PID 参数的实时调整, 以达到最佳控制效果。然后进行仿真,与PID仿真结构进行对比。通过仿真实验证明模糊PID控制的优点。
2 逆变器控制策略的研究
2.1 逆变器的数学模型
在正弦波逆变电源系统中,多采用全桥或半桥结构。以图2.1所示的单相全桥逆变电路为基础。其中s1-s4为开关管,Ud表示直流输入电压,L为输出滤波电感,c为滤波电容,r为综合了线路电阻、滤波电感等效串联电阻、开关管压降和死区效应等因素的等效电阻,z为负载。逆变器工作在单极性PWM方式,直流电压源E通过功率开关器件向负载提供交流电。
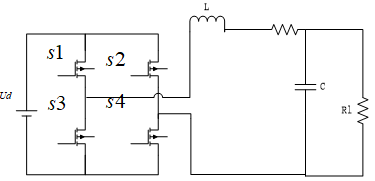
图2.1 单相全桥逆变电路
尽管模糊控制不依赖于控制过程的数学模型,但可以是数学模型作为产生知识基础的有用的信息源。将源于DC/DC变换器分析建模的状态空间平均法应用于DC/AC逆变器所建立的数学模型,能够反映大多数情况下逆变器系统中状态的中低频变化规律,适用于系统控制的分析设计。选择滤波电容电压Uc和滤波电感电流iL为状态变量,可得逆变器的连续状态空间方程如下:来!自~751论-文|网www.751com.cn 新型控制技术在逆变电源中的应用研究(4):http://www.751com.cn/zidonghua/lunwen_76085.html