
1引言
1.1 研究背景
工业系统现代化的一个主要发展方向,就是将工业控制技术与网络技术和通信紧紧结合,这就是工业系统的规模化、规范化和智能化发展的必然过程,也是网络技术与计算机通信技术不断发展的一定趋势。在控制发展的初期阶段,主要的特色就是大规模结构控制,即控制系统的控制部分、传感元件和执行单元都是一点对一点的,通过有线的方式直接连接,这样的话信号在传输过程中,基本没有数据包的丢失或者时延,是比较直接明了的控制方式。但随着技术发展,现场设备的不断增加,布线更加复杂、成本一直提高、抗干扰能力较差、自适应性不够、扩展为大系统比较不方便等问题,逐渐显露出来。
为使复杂的大规模系统的控制和远方控制的客观需求得到满足,集合了网络结构改变、控制点的智能化、控制方式的现场化、功能不断分散化、系统不断开放化、产品不断集成化等优点于一身,我们研究的网络控制系统横空出世了,并大规模应用于自动化系统、航空和航天、远端控制技术等领域,这让网络控制系统,这个涉及多个学的科性研究领域,正在成为控制理论界研讨的问题之一。因此。可以发现,网络控制系统一定会是未来工业化,控制的系统化的发展方向[8]。论文网
1.2 网络控制系统概述
网络控制系统(networked control systems简称为NCSs)是计算机技术(computer)、通信技术(communication)和自动控制技术(control)简称3C技术相结合的产物[2]。它的一般定义是指通过计算机网络和总线将传感器、控制器和执行器作为网络系统连接起来共同完成闭环 控制任务的系统。其基本组成框图如图1.1所示。与传统点对点结构的控制系统相比,网络控制系统的很大一个优点在于网络方式布线很简单,比传统控制的连线的数目少,方便扩展,成本较低廉,控制设备可以立即插立即使用,方便检修和器件维护,有很强的抗干扰能力,数据传输的可靠性能比较高,数据的可交换能力强,而且能够实现资源互相共享等等。
但是由于受到网络带宽和网络服务质量的限制网络控制系统中又引入了许多的问题,如网络时延、网络丢包、采样与量化、网络拥塞、时序错乱、网络的信息调度策略等,这些问题会降低系统的稳定性、影响系统的动态性能。
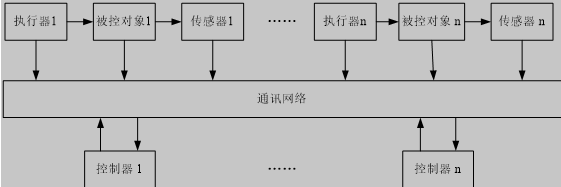
图1.1 网络控制系统的典型结构图
1.3 网络控制系统中存在的基本问题
1.3.1 网络时延
网络化的控制模式使得信息传输需要分时占用网络通讯资源且由于网络的承载能力和通讯带宽有限导致数据传输发生碰撞、多路径传输、网络拥塞、连接中断等现象时有发生;同时由于受到传输距离的影响数据在传输过程中不可避免地会存在时延这种由网络引起的时间延迟。在网络控制系统中时延包括传感器与控制器间的时延 、控制器与执行器时延 以及控制器执行运算产生时延 。
1.3.2 节点的驱动方式
网络时延不仅与网络状态和调度算法有关,还和节点的驱动方式紧密相连。网络控制系统中的节点驱动方式有时间驱动(time driven)和事件驱动(event driven)两种。时间驱动是指网络节点按照既定的时间规律工作,如传感器周期行的采样;事件驱动为当某一事件发生时节点才开始工作,如中断处理过程。对于节点不同的驱动方式,网络时延表现出不同的特性。当传感器、控制器和执行器都采用时间驱动的时候,网络时延就变成固定时延,但这有浪费网络资源和有损控制系统性能的嫌疑。一般情况下,传感器采用时间驱动,控制器和执行器采用事件驱动。客观上,事件驱动可以减少网络时延,并且避免了时间驱动对时钟同步的硬性要求。 RBF神经网络控制系统时延模型的探讨与仿真(2):http://www.751com.cn/zidonghua/lunwen_74282.html