
(3)微电子技术的发展。高性能矢量控制系统,若没有高效能微处理器支持,将很难实现。16和32位高速微处理器和含浮点处理单元DSP及专用集成电路ASIC的技术的高速进步,为变频调速多功能化的实现提供了可能。
(4)产品化生产。基础产业、工业、制造业的快速发展进步,提供配套变频器生产的大力支持。
(5)电源频率转换装置、永磁同步电机和它的控制系统的快速进步。近年来,高电压、大电流和串联,并联和多层次的技术的发展,高压变频调速是可以实现的,而且具有明显地节能效果。
1.3 本文的研究内容安排
本文主要是运用了MATLAB技术对双闭环和开环下的异步电动机变频调速系统进行仿真,本文的具体章节安排如下:
首先第一章对毕业论文研究背景进行说明,并对变频调速系统所属的相关领域及发展环境进行简要的叙述。
其次在第二章描述异步电机的数学模型,在数学模型的基础上推演出坐标变换,然后再介绍关于矢量控制的相关原理。
接着在第三章对SPWM整流器进行介绍,并注重描述如何研究三相电压型SVPWM整流器直接电流控制方式。
最后在第四章利用MATLAB仿真软件对异步三相电动机的电流型双闭环SPWM的变频调速系统先建模再仿真,并与开环系统仿真结果相比较得出结论。
2 基于动态模型的异步电动机调速系统工作原理
异步电机具备多变量、强耦合、非线性的特征,从动态模型出发,从而获得调速性能,分析异步电机地磁链与转矩控制的规则,对高性能异步电机的调速方案进行研究。矢量与直接转矩控制系统是两种已经能够成熟的应用到电动机调速系统。矢量控制系统主要是矢量变换和按转子磁链定向两种方法,从而获得等效电机得模型,接着通过模仿直流电机地控制策略方法并设计控制系统。
2.1 异步电动机的数学模型 文献综述
2.1.1 在研究电机的多变量模型时,做以下假设:
(1)忽视空间的谐波,并设三相绕组为对称的,而且在空间互成120(电角度)差,发生沿正弦规律散布的磁动势;
(2)忽视磁路饱,自感和互感都是恒定;
(3)忽略铁心的损耗;
(4)忽视频率与温度对电机参数产生的影响。无论是线性或鼠笼绕组转子电动机,它等同于一个转子,在定子侧,转换后每相绕组匝数相同。这就相当于三相异步电机模式的物理模型。在三相异步电机物理模型里面,三相绕组轴线 固定在空间,故定义为三相静止坐标系。设转子以 速度开始旋转,绕组的轴线为 随转子旋转,A轴为参考坐标轴。定子A轴和转子a轴之间的电角度差q是空间角位移变量。如图2-1所示,是三相异步电动机的物理模型。
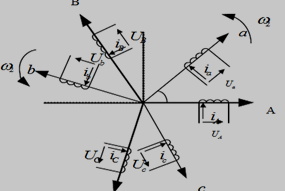
图2-1 三相异步电动机物理模型
2.1.2 异步电动机三相动态模型的数学表达式
(1)磁链方程 异步电动机的数学模型由下述的电压方程、磁链方程、转矩方程和运动方程组成,其中磁链方程和转矩方程为代数方程,电压方程和运动方程为微分方程。异步电机的每个绕组的磁链等于它自身地自感磁链加上其它绕组的互感磁链,因此,六个绕组磁链如下所示。
(2-1)
式中,L—6x6阶的电感矩阵,其中 是有关的绕组自感,其它的各项就是绕组的互感。对每个项绕组来说,它交链的磁通是漏磁通加上互感磁通,所以定子与转子的自感为: 基于Matlab的变频调速系统研究(3):http://www.751com.cn/zidonghua/lunwen_73503.html