
步进电机的主要技术指标:
1、转动力矩
步进电机在额定电流、电压下,其转轴上生成的转矩为转动力矩。步进电机通常是用来驱动对象转动或产生位移的,想选择多大转矩的步进电机完全依据于使用者的需求。步进电机的转速增大,其转动力矩就减小,步进电机转动时,其绕组上的电感将产生一个与频率成正比的反向电动势[2]。
2、保持转矩
步进电机停滞时的力矩称为保持转矩,它是电机的重要参数之一[3]。步进电机低速运行时的力矩与保持转矩相接近。步进电机的转速越大,其输出力矩、输出功率就越小。
3、步进角
步进角顾名思义就是步进电机每前进一步,转子轴所旋转的角度。步进角随步进电机型号的不同而不同。步进角从0.5度到15度每步大小不等,使用者可以根据实际需求自行选择。
4、精度
作为一种定位装置,步进电机因为其准确性和重复性受到广泛的欢迎。通常步进电机每步会有一个步进角的3-5%精度的误差,这个误差并不是一步一步累积的。步进电机的精度主要是与机械精度的零件和装配有一个函数关系。文献综述
5、转矩和速度特性
选择合适的电动机和为一个特定的应用程序选择驱动方法的关键是转矩和速度特性[4]。这些特征是依赖(改变)电动机驱动程序或驱动方法的激励模式和类型。一个典型的“速度-转矩”曲线如图2-1所示。
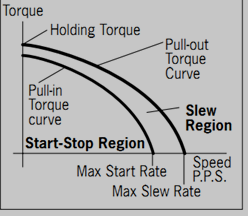
图2-1 步进电机的转矩与速度特性
图中牵入曲线(pull-in torque curve)定义了一个区域称为启动停止区域。这是电机可以瞬间启动/停止有负载,没有失去同步的最高频率。在牵出曲线(pull-out torque curve)定义了一个区域称为扭转区域。它定义了电机可以操作没有失去同步的最大频率。因为这个区域在牵入区域之外,电机必须加速或减速进入该区域。空载时电机有最大工作频率。牵入特性的不同也取决于负载。负载惯性越大,牵入区域就越小,从上图2-1的曲线表明,步进电机的输出能力受步进率的影响。速度-转矩曲线的形状根据使用的驱动器类型可以发生巨大改变。用户应理解电机制造商发展速度-转矩曲线使用的是什么驱动程序类型或方法。一个给定电机的速度-转矩特性根据使用的驱动方法不同可以有显著地变化。
2.2 步进电机的工作原理
步进转动是步进电机的特点,在没有超载时,改变步进电机负载大小并不会改变电机的运转,电机转速和停止位置是由脉冲频率和脉冲数确定的。
图2-2是一四相步进电机工作原理示意图。该四相步进电机是由单极性直流电源供电,要使步进电机工作,首先要确定符合使用者需求的时序,再给步进电机的各相绕组上电,就能使其转动了[5]。
图2-2 四相步进电机步进示意图
如图2-3为电源通电时序与波形,分别是单四拍、双四拍与八拍的工作方式:
图2-3 步进电机工作时序波形图
2.3 步进电机的分类
随着现代数字电子科技的发展,我们通常将步进电机分为反应式、永磁式和混合式等几大类。
反应式:它存在的时间最长,在结构上是最容易被人理解的。图2-4显示了典型的反应式步进电机的截面。它的组成是一个软铁具有多齿的转子以及具有缺口的定子。电机的两极在直流电强化定子绕组电源时会被磁化。当通电磁化的两极吸引住转子齿时,电机就会开始转动。 AT89C51单片机多功能步进电机驱动器设计(2):http://www.751com.cn/zidonghua/lunwen_72856.html