
23
结 论 24
致 谢 25
参考文献 26
1 绪论
1.1 选题背景与意义
近年来,精确制导武器系统在战争中的突出表现,引起了人们的普遍关注。我们看到了我们的落后,看到了高科技战争的成功,这都在鞭策我们迎头赶上。这些年来,我国卫星导航定位技术的应用和精确制导武器的研究均得到了快速的发展。
随着北斗二代卫星导航系统的组建,可服务范围将不断扩大,其应用领域必将不断拓展,从而产生巨大的社会和经济效益,因此研制北斗/惯性组合导航系统是国内的必然选择。
为满足战争环境的需要,现代制导武器的导航系统既要求有很高的导航定位精度,又要求可以适应各种不同的战争环境,具有高的可靠性[2]。论文网
选择组合导航系统以惯导系统为主,其原因主要是由于惯性导航能够提供比较多的导航参数,还能够提供全姿态信息参数,这是其他导航系统所不能比拟的[3]。此外,它不受外界干扰,隐蔽性好,这也是其独特的优点。惯导系统定位误差随时间积累的不足可以由其他导航系统补充。惯性导航系统与BD-2(北斗二代)卫星定位系统间的组合,不仅能做到性能上的互补,提高接收机的动态性能和抗干扰能力,而且可以真正做到系统的单板集成或者芯片级集成,势必成为未来军用导航系统发展的一个主要方向。故研究北斗/惯性组合导航系统的关键技术对于提高我国的武器系统实用性、可靠性和打击精度具有重要意义。
1.2 国内外研究现状
1.3 研究内容和主要工作
本论文的主要任务和目的是:利用计算机系统及航迹规划与数据显示仿真软件、北斗仿真软件、IMU(惯性测量单元)及北斗/惯性组合导航仿真软件建立北斗/惯性组合导航仿真系统,尽可能逼真地再现北斗接收机、IMU组件及北斗/惯性组合导航实物系统的功能和接口特性,并采用Visual C++编程语言,运用MFC(Microsoft Foundation Class library)进行实时监控界面的设计,通过丰富的对话框、图表、动画等实时显示导航系统的经度、纬度、高度、速度、收星数等测量信息,最后将设计的核心算法与实际的MEMS惯导、北斗2代卫星导航接收机等搭建北斗/惯性组合导航半实物仿真系统,用于导弹和其他武器系统的仿真实验和性能分析。文献综述
本论文章节结构安排如下:
第一章:绪论。
第二章:北斗2/惯性组合导航系统基本介绍。分别阐述了北斗二代卫星导航系统、捷联惯性导航系统以及组合导航系统的发展现状、系统组成、工作原理、主要功能及应用领域。
第三章:程序所用硬件基础的基本介绍。
第四章:北斗2/惯性组合导航仿真系统设计的软件平台。介绍了BD-2接收机以及MFC可视化软件设计的具体过程:首先将各个功能分成模块,进行模块化的设计;然后,根据所要实现的功能选择合适的开发工具,并简单的介绍它们的特点。
第五章:BD-2/SINS调试结果分析。对MFC软件进行系统测试,测试包括两个部分。一方面是在软件设计过程中利用虚拟串口和串口调试助手的测试,另一方面是软件设计基本完成后,基于BD-2接收机和RS-232串口的测试。
2 北斗2/惯性组合导航系统基本介绍
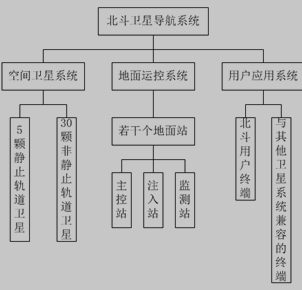
2.1 北斗二代卫星导航系统(BD-2)
北斗卫星导航系统其组成如图2-1所示。
 北斗2/惯性组合导航可视化仿真软件设计(2):http://www.751com.cn/zidonghua/lunwen_72491.html
北斗2/惯性组合导航可视化仿真软件设计(2):http://www.751com.cn/zidonghua/lunwen_72491.html