
(1)调整机械结构,降低车模重心;选择合适材料,减轻车模重量。两轮直立小车是一个高度不稳定的系统,其具有本质不稳定性。根据质心位置是否可变,可分为定质心跟变质心两种。车模直立时,车模重心位于两轮轴线正上方,降低重心有助于保持车体平衡。通过电路板的合理布局,可以降低车模重心。同时,由于车模是两轮驱动直立行走,减轻车模自身重量有助于减轻电机的负载压力,减小惯量,提高车模的灵活性和稳定性。
(2)选择合适的行走姿势。根据对去年成绩较好的比赛队伍的观察,车体前倾有助于提高小车行走速度。车模自身重量大部分来自电源,通过调整电源位置可以改变车模的行走姿势。
(3) 单片机核心控制模块。本次智能车设计采用飞思卡尔公司提供的16 位单片机MC9S12XS128[13]。
(4)传感器选择。本次智能车设计采用的传感器主要有:角度传感器,车体倾角传感器,电机速度传感器和线性CCD传感器。角度传感器用于检测车模的倾角,角度传感器用于检测车模倾倒的角速度,返回数据通过卡尔曼滤波后相互协调,控制车模平衡。速度传感器使用光电编码器,读取脉冲个数转化为车模速度,与给定速度构成闭环系统,实现闭环控制[14]。线性CCD传感器采集横向128个点的灰度值,经单片机处理判断赛道类型,控制两路电机转速,使车模沿赛道中心线行走。源.自/751·论\文'网·www.751com.cn/
(5)人机接口模块。本次智能车设计采用的人机接口模块主要有拨码开关、CH452 按键键盘、数码管和发光二极管等,主要用于显示车模运行状态,方便调试。
2.2 系统总体框架设计
本次设计中,硬件电路主要分为以下8个模块:单片机核心控制模块、电源管理模块、电机驱动模块、角度传感器模块、光电感器模块、速度传感器模块、人机接口模块和无线通信模块[15][16]。硬件系统模块的组成框图如图2.1所示:
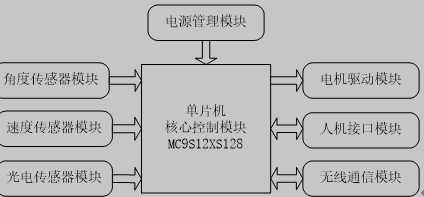
图2.1 硬件系统模块的组成框图
其中各模块功能分别如下:
(1)单片机核心控制模块:作为整个系统的控制核心,单片机主要采集角度传感器、角速度传感器、光电编码器、线性CCD传感器返回数值,并对数据进行滤波处理,判断赛道信息、车模自身信息等,通过闭环控制电机转速从而保持车模直立循迹行走。
(2)电源管理模块:将电源电压通过稳压芯片转换为各控制模块所需要的电压,维持整个系统的正常运行。
(3)电机驱动模块:根据单片机输出的PWM波,采用全桥驱动,对车模两个直流电机进行转速控制。
(4)角度传感器模块:角度传感器模块主要包括陀螺仪和加速度计,采集车模运行过程中的角度和倾斜的角速度,通过单片机处理,控制车模直立。
(5)光电传感器模块:本次使用的光电传感器为线性CCD,扫描一行赛道128个点的灰度值,通过单片机处理成赛道信息,控制车模转向。
(6)速度传感器模块:采集编码器输出脉冲,经过单片机转化为小车速度,与给定速度构成闭环控制系统。
(7)人机接口模块:通过数码管可以实时显示各类参数,通过按键可以切换车模运行状态,方便小车调试。
(8)无线通信模块:通过蓝牙将智能车运行状态发送给上位机,并能以波形的形式显示出来,以便于调整程序参数,提高调试效率。
单片机光电导引车控制系统硬件设计+PCB电路图(4):http://www.751com.cn/zidonghua/lunwen_72487.html