
(1)视觉导引智能车系统一些硬件辅助设计与选型以及硬件资源的分配。
(2)视觉导引智能车系统整体软件构架的规划构建以及各模块软件设计和实现。
(3) 视觉导引智能车系统各模块单独及联合调试,利用上位机显示处理后的图像,修改控制参数,改进控制方案。
本文章节内容安排如下:
第一章,绪论。介绍课题研究背景及意义;智能车辆国内外的研究现状;“飞思卡尔”杯智能车比赛简介;最后给出本文的主要工作。
第二章,智能车系统的总体设计。简要地介绍智能车系统的总体设计思想,包括智能车系统的组成以及各组成结构的具体功能;简要介绍了视觉导引智能车系统的硬件方面关于视觉传感器的选型,以及硬件资源的分配。
第三章,视觉导引智能车系统的软件设计。主要介绍了视觉引导智能车系统的软件设计,给出了各个主要模块的软件设计方案,并作了具体的介绍。
第四章,智能车系统调试与测试。对各功能模块进行调试和分析,给出调试结果,并对调试得到的结果进行分析。分析解决在软件的设计和调试的过程中所出现的问题。
2 视觉导引智能车控制系统总体设计
2.1 系统整体设计思想
本设计的最终结果是需要智能车按照给出的轨道自主循迹完成一圈完整的路程。摄像头作为智能车的“眼睛”,需要认识黑线、找到黑线,找到目标后就要将获得的信息送到小车的“大脑”——MC9S12单片机进行处理。另一方面,“大脑”还需采集实时速度信号,综合处理各方面数据之后进行控制决策,执行机构收到命令立即执行。同时为了方便调试,我们需要加入一些辅助手段,如LED灯、数码管、无线通讯等。文献综述
总结之后,智能车主要由四个方面组成:第一,信号采集和处理(包括视频采集和编码器测速);第二,控制决策;第三,执行机构(包括转向舵机、摇头舵机以及电机);第四,辅助调试。其整体结构图如图2.1所示。
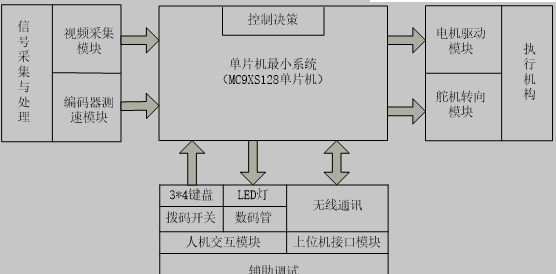
图2.1 视觉导引智能车系统的组成框图
2.2 视觉导引智能车系统组成结构介绍
信号采集与处理:信号采集与处理系统包括了图像采集模块、图像处理模块、路径判断模块以及编码器测速模块。控制系统通过摄像头采集图像后对采集到的图像进行数据处理再据此判断引导线(黑线)的位置及其变化趋势,同时结合实时反馈的速度信号,运用相应的控制算法对转向和速度进行控制。
控制决策:控制策略与路径判断模块联系紧密,在控制系统判断路径之后采取控制策略进行对舵机控制模块、电机控制模块的控制。本设计目的不仅仅是让小车巡线行驶,还要在此基础上以最优的路径行驶,以最稳定的状态、最短的时间完成比赛。那么如何以较优的路径行驶、如何对不同的特征赛道进行相应的处理、如何使系统更加稳定对干扰较多的地方进行去干扰处理,这就是路径识别和行驶策略的内容。源.自/751·论\文'网·www.751com.cn/
执行机构:执行机构主要是控制转向舵机、摇头舵机以及电机的运转,通过单片机给出不同的PWM波占空比进行控制。
辅助调试:人机交互模块主要是为了方便智能车的调试。在智能车运行过程中,通过人机交互模块实时显示智能车的运行状态,例如当前小车速度信息或检测到赛道上黑线的位置信息等,有利于当智能车出现问题时方便排查。拨码开关、键盘可以给智能车设定一些初始量,让智能车按设定值进行运行,省去了反复下载程序的麻烦。上位机接口模块主要负责与上位机的通信。无线通讯模块可以与单片机进行通信,实时将智能车一些信息传到上位机进行显示。 视觉导引车控制系统软件设计(3):http://www.751com.cn/zidonghua/lunwen_72475.html