
1.2高性能伺服系统的研究现状
1.2.1多电机同步联动控制方法
1.2.2齿隙非线性环节控制补偿方法
1.2.3伺服系统的控制策略
1.3本文所做的工作
第一章.介绍了选题的背景和意义,简要回顾了目前国内外高性能伺服系统的研究现状。概括介绍本文所做的主要工作和研究的主要内容。
第二章.先对无齿隙单电机驱动系统建模,在此基础上对无齿隙双电机驱动系统进行建模,然后对齿隙非线性部分进行了分析,完成对含齿隙双电机驱动系统的建模。
第三章.电机传动消隙研究。在大多数的实际工程应用中往往采用机械消隙和控制消隙相结合的方法,本章针对伺服系统的电机传动消隙作研究。最后通过引入偏置力矩设计的控制策略来减小补偿齿隙非线性对系统的影响。
第四章.双电机同步联动控制方法研究。首先介绍了双电机同步联动的原理,对双电机同步联动控制模型进行了描述,设计了PI差速负反馈控制器,最后对双电机同步联动效果进行了仿真分析。
最后.结合自己的体会对本文的工作进行了总结和展望。
2 双电机同步联动伺服系统的建模
先对无齿隙单电机驱动系统建模,在此基础上对无齿隙双电机驱动系统进行建模,然后对齿隙非线性部分进行了分析,完成对含齿隙双电机驱动系统的建模。
2.1无齿隙单电机驱动系统建模文献综述
2.1.1单电机驱动系统结构
单电机驱动系统由电机带动一个小齿轮,通过小齿轮和大齿轮啮合,驱动一个带负载的大齿轮转动,图2.1给出了单电机驱动系统的结构简图。其中,U为电机的电枢电压, 为电动机的转速, 为小齿轮的转动惯量, 为大齿轮和负载的转动惯量。在系统建模中,忽略传动轴的形变问题。
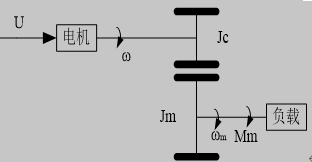
图2.1.单电机驱动原理图
2.1.2单电机系统动力学方程
(1)电枢回路电压平衡方程
电枢回路的等效电路如图2.2,其中U为电枢电压,R为电枢回路等效电阻,L为电枢回路等效电感,I为电枢回路电流,E为反电动势。
图2.2 电机的等效电枢电路图源.自/751·论\文'网·www.751com.cn/
由以上电路图可以得到电枢回路的电压平衡方程为:
另外,根据反电动势原理可得,反电动势可以表示为:
其中, 为电动机的反电动势系数, 为小齿轮的转动角度
双电机联动伺服系统控制策略设计(2):http://www.751com.cn/zidonghua/lunwen_72473.html