
致 谢 41
参考文献 42
1 绪论
1.1 倒立摆系统的研究意义
倒立摆系统是一个典型的多变量、非线性、强耦合、快速运动的自然不稳定系统[1]。某一控制理论理论的正确性、实用性和可行性需要一个实际对象进行验证,倒立摆系统成本低廉、结构简单、物理参数和结构易于调整,恰好为检验控制理论提供了一个理想对象,其稳定控制性能可以直观地反应控制理论的优劣性。另外,倒立摆系统的研究还具有重要的现实意义。其动态过程与人类的行走姿态类似,其平衡与火箭的发射姿态调整类似[2]。倒立摆系统的许多科研成果被广泛地应用到航天事业、机械生产等领域。文献综述
1.2 倒立摆系统的控制方法及现状
1.2.1 线性控制
1.2.2 模糊控制
1.2.3 神经网络控制
1.2.4 遗传算法寻优
1.2.5 鲁棒控制
1.3 本文研究的主要内容
本文主要研究了直线倒立摆系统的起摆和稳摆控制算法,运用Matlab软件进行仿真并在实物系统中进行实验,验证了算法的可行性。文中各章主要内容如下:
(1) 第1章主要介绍了倒立摆系统的研究背景、研究意义及研究现状等。
(2) 第2章分别运用牛顿力学方法、拉格朗日方法建立了一级、二级倒立摆系统的非线性模型,并对系统进行了定性分析。
(3) 第3章研究了一级倒立摆起摆问题,采用能量控制实现了一级倒立摆的自起摆,并结合LQR控制实现了起摆控制与稳摆控制的切换。
(4) 第4章针对一级、二级倒立摆的稳摆控制,分别设计了常规模糊控制器和自适应模糊控制器。针对量化因子和比例因子,采用两种自适应方法:通过寻优量化因子阈值设置各参数取值;提出一种基于模糊调节器的在线调整方法。
(5) 第5章运用RBF神经网络设计了摩擦补偿策略以优化模糊算法,并在一级倒立摆实际控制实验中验证了算法的有效性。
(6) 第6章将所设计的控制方案运用到实际系统中,调试并优化控制参数,最后对比分析了各控制算法的控制效果。
2 直线倒立摆系统及建模源:自~751-·论`文'网·www.751com.cn/
2.1 倒立摆实验系统
2.1.1 倒立摆实验系统组成
本设计采用固高公司生产的倒立摆实验系统,对直线一级、二级倒立摆系统进行研究。实验系统由倒立摆本体、电控箱、装有运动控制卡的PC机三大部分组成,如图2-1所示。
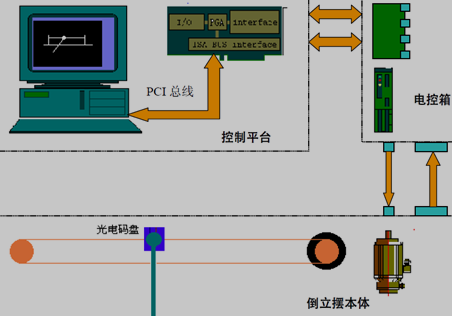
图2-1 倒立摆系统框图
倒立摆本体主要包括小车、摆杆、滑杆轨道、电机、编码器等几部分,如图2-2所示。摆杆和小车为系统的被控对象,电机通过同步带驱动小车在滑杆上运动以保持摆杆平衡,编码器将小车位置和摆杆角度反馈给运动卡。
电控箱主要由交流伺服电机、I/O接口板、开关电源、开关、指示灯等电器元件组成,如图2-3所示。
系统控制平台包括:与IBM PC/AT兼容的PC机,带PCI/ISA的总线插槽,T400-SV-PCI、GM400运动控制卡,GT400-SV-PCI、GM400运动控制卡用户接口软件。
RBF直线倒立摆模糊控制及摩擦补偿研究(3):http://www.751com.cn/zidonghua/lunwen_71736.html