
19
结论 20
参考文献 21
致谢 22
附 录 23
1 绪论
1.1 GPS的由来及发展
导航卫星定时测距全球定位系统(Navigation Satellite Timing and Ranging Global Position System GPS)是美国第二代卫星导航系统[1]。定位服务包括两个服务,标准定位服务(SPS)和精密定位服务(PPS)。SPS对于普通民用用户,供全世界用户无限制,免费地使用[2]。而PPS授权的精密定位系统用户需要特殊的接收机和密码设备两个条件才能使用。
1.2 GPS定位系统的组成部分
每颗GPS卫星时刻发布其时间和位置数据信号,通过一系列处理过程,实现对GPS卫星信号的跟踪、锁定和测量,从而产生计算位置的相关数据信息,经由I/O口输出串行数据。完整的GPS包括三部分:空间部分,地面控制系统,用户设备部分。
(1)空间部分
GPS的空间部分是由24颗卫星组成(21颗工作卫星,3颗备用卫星),它位于距地表20200km的上空,轨道倾角为55°。卫星的分布使得在全球都可观测到4 颗以上的卫星,并切能够预存相关导航信息。
(2)地面控制系统
地面控制系统由监测站(Monitor Station)、地面天线(Ground Antenna)、主控制站(Master Monitor Station)三部分组成。
(3)用户设备部分
用户设备部分也就是GPS 信号接收机。其主要功能是能够捕获到按一定卫星截止角所选择的待测卫星,并跟踪这些卫星的运行。
1.3 GPS接收机模块定位流程
(1)搜索可用卫星,接收卫星信号,与卫星信号同步,提取导航电文信息。
(2)从导航电文中获取计算位置所需的信息,这些信息应该包括时钟信息和星历等数据。
(3)进行其他相关的校正,例如根据卫星信号到达GPS接收机所需要的时间,校正地球旋转所造成的卫星位置的偏差。
(4)根据定位原理,计算出GPS接收机的原始位置,并将其转换成所需的坐标格式进行输出或显示。
2 基于单片机的GPS接收机的硬件设计
课题要求研制的GPS接收机要具有接收、处理、显示信息等基本功能。硬件上必须有相应的接收处理部分、显示部分和配置输入部分,同时需要处理器实现各部分功能的联合。由于单片机系统结构简单,价格低廉,集成度较高,同时相关的技术已经成熟,处理器部分使用单片机实现。
本课题设计的硬件系统主要由:GR-87型号的GPS模块、单片机、显示等部分组成。如图2-1所示:
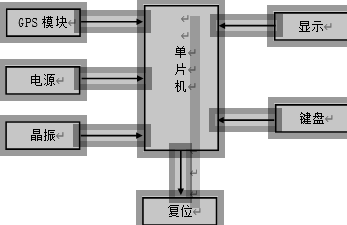
图2-1 系统框图
2.1 AT89C51单片机
2.1.1 AT89C51单片机的结构原理
硬件核心控制任务是由单片机来完成的,单片机的采用使硬件电路设计大大的简化了,并且性能更加可靠。
在本次设计中,采用MCS-51系列单片机,尽管信号处理和计算的功能相对弱些,但由于其体积小、可靠性高、性价比高及应用范围广,所以适合于小型化作业。GPS信号接收和处理部分与单片机进行串口通信时,由于都采用了TTL电平,所以两者之间不需进要行电平转换就可直接通信。
AT89C51单片机简易GPS接收机的设计+程序+电路图(2):http://www.751com.cn/zidonghua/lunwen_71543.html