
(3)定位速度:200mm/s;
(4)重复定位精度:与所选同步齿形带传动精度相当;
(5)测量装置工作稳定、可靠,具有非接触限位功能。
1.3.2 章节安排
论文全文共由五章组成,具体的章节安排和各章的主要内容安排如下:
第一章 引言
第二章 控制系统设计
第三章 硬件系统设计
第四章 软件系统设计
第五章 系统调试及实现
最后对全文工作作出总结,并对以后工作进行展望。
2 控制系统概述
2.1 总体方案叙述
2.1.1 系统组成结构
自动影像测量系统主要由机械结构子系统、光学成像子系统、运动控制子系统、图像采集子系统、图像处理子系统及数据库子系统组成。机械结构子系统用于建立自动测量所进行的物理空间,主要由XYZ三向运动坐标和小视场相机旋转机构组成;光学成像子系统由光源、大视场镜头及小视场远心镜头组成;运动控制子系统用于控制XYZ三坐标联动和小视场相机的旋转;图像采集子系统完成大视场全景图像和小视场序列图像的自动采集;图像处理子系统主要进行大视场全景图上被测特征的识别、小视场测量路径规划和序列小视场图像尺寸特征的提取;数据库子系统存放大视场图像识别得到的被测特征的方位数据,供运动控制子系统读取完成小视场序列图像的自动采集,小视场图像处理得到的被测特征参数也存放于数据库,供上下游系统读取实现数字化交互[4-5]。
运动控制子系统在自动影像测量系统中起着举足轻重的作用。主要实现对测量装置上xyz三坐标联动,快速、平稳运动至待测零件上方。文章主要对控制系统进行开发和研究。
2.1.2 测量系统工作步骤
测量系统工作步骤:(1)测量空间标定与被测特征识别。建立三维测量空间OMXYZ,设被测目标区域为F0,首先,在O1点对测量平面进行标定,并对目标区域全局成像(图像为S11,成像视场F11略大于F0);然后,建立大视场图像坐标与测量空间坐标之间的映射关系;之后,在大视场图像上识别被测特征,求解被测特征的测量空间(方位)坐标。
(2)小视场图像测量路径规划与自动采集。根据小视场尺寸和被测特征形状及方位,计算选择一条优化的小视场图像采集路径,然后,由控制系统引导完成小视场序列图像的自动采集,图2为小视场序列图像S2i (i=1,2,…,n)的采集示意图,其采集平面是O2,其中S2k (1≤k≤n)像面相对于大视场图像S11的像面有旋转。
(3)被测特征参数提取。根据小视场序列图像采集参数和图像上几何特征的分布,在序列小视场图像的重叠区域构建辅助测量特征并进行同名特征匹配。之后,在各小视场序列图像上,通过被测特征和辅助测量特征的坐标提取被测尺寸局部参数,并对局部误差进行估计与补偿。最后,根据小视场序列图像在测量空间中的方位,对各局部被测特征参数按方位进行计算并求和得到整体被测特征参数[6]。
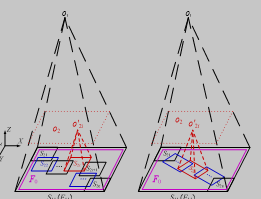
图2-1 机器视觉协同测量系统图像采集示意图
测量空间坐标系、物面坐标系与图像坐标系
2.2 控制方案
为实现xyz三轴的单独运动和联动控制,考虑系统的可靠性和经济性,系统采用的控制方案如下:设计以单片机为微处理器,步进电机为执行元件的控制系统。控制以atmega16为核心,包括电机控制、串口通讯、步进电机加减速控制、运行结果存储等单元。数据库用来存取上位机的坐标定位信息。控制界面由Borland C++编写,可发出控制命令或数据,并通过RS232传输给单片机。单片机实时接受并处理命令或数据。当接受到运行命令时,单片机发出控制脉冲给步进电机驱动器,驱动器则驱动步进电机带动三维测量装置按照指定的路径运动。同时,机械装置xyz三个轴的当前位置坐标将存入数据库,作为下一次运动的参照坐标。 Atmega16单片机自动影像测量设备控制系统研究与开发+程序(3):http://www.751com.cn/zidonghua/lunwen_67155.html