
利用上位机中的人机交互界面,可以模拟现场的操作环境,实现自动化远程控制。同时借助计算机的平台可以方便地完成搬运系统动作轨迹的重新设定,以及根据现实需要对动作序列及轨迹进行在线学习,即自动记忆操作员手动输入的动作类型和顺序,为现场操作或远程控制提供自定义动作序列。使非接触搬运系统具有更加柔性的运动模式,适应更多的生产环境。以上功能的实现都是基于AVR与上位机的双工异步串行通信,上位机中一般可以利用VB的通信控件MSCOMM来完成数据的异步收发。
1.3 本文主要研究内容
本课题主要是针对非接触式搬运系统,基于AVR单片机ATmega128研究并设计其控制器,实现现场操作与远程控制的双重功能,利用计算机上的人机交互界面完成动作序列的在线学习等功能,并通过试验验证控制系统的可行性。本课题的研究内容如下:
(1) 建立已有搬运执行系统的功能结构模型,分析系统气动回路和系统所要实现的控制目标。分析阀岛装置的组成结构及其控制方式,并了解相关电磁换向阀与磁性接近开关的电气特性,为控制电路的设计做准备。
(2) 通过对电磁阀及磁性接近开关电气特性的分析,结合控制系统所要实现的控制目标,制定非接触式搬运装置控制系统的结构。其中,应包含电磁阀控制的驱动电路、手动按键输入电路、接近开关状态信号采集模块、控制模式选择模块、控制按键中断系统、程序下载电路及异步串行通信模块等。同时,完成电子元器件的选用、控制电路的设计与制作。
(3) 根据控制电路及系统功能要求,基于AVR单片机编写控制程序;在现场操作控制系统的基础上,利用VB环境编制机控操作平台,即人机交互界面。该平台能模拟现场操作的全部功能,同时增加搬运系统动作序列设定的功能,包括通过始末点获得优化动作序列和在线学习两种模式。
(4) 连接控制电路板与非接触式搬运系统,搭建试验平台,完成系统的软硬件联调,验证控制系统的可行性。
2 执行系统分析
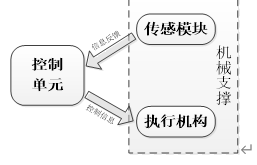
非接触式搬运系统往往由控制单元、传感模块、执行机构及机械支撑等部分组成,如图2.1所示。本课题构建的搬运系统,将基于AVR单片机设计制作控制器,作为系统的控制单元,对来自传感模块的信号分析处理,完成相应的控制信号的输出,以驱动执行机构的动作。作为一个气动系统,对电磁阀的合理控制将是整个系统顺利工作的关键,有着至关重要的作用,也是控制器设计的一个重点。
AVR单片机的非接触式搬运系统控制器设计(4):http://www.751com.cn/zidonghua/lunwen_66371.html