
本论文所研究的磁悬浮系统结构简单易于分析,我们在此做了深入的研究,研究了他的动态性能和静态性能,以及抗干扰能力。复杂磁悬浮系统的研究要复杂的多,不仅在于数学模型建立难度大,而且本身的干扰因素比较多。而本课题所做的研究非常适合作为其研究基础。本次设计的模糊PID控制器,也具有相当多的优点。因为结构简单,所以研究时间短,可避免浪费资源。由于不同自由度磁悬浮系统在原理上的相近性[4],多自由度磁悬浮系统可以借鉴本课题的研究成果[10],并在此基础上得到发展。因此,对磁悬浮模糊控制器的研究具有重要的理论和实践意义。
1.2 国内外研究现状及研究方向
1.2.1 国内外研究现状简介
1.2.2 研究方向
1.3 课题的主要工作
根据实验室里的磁悬浮系统,设计一款模糊控制器,要求实现磁悬浮系统的精确控制。在控制过程中,使系统的电磁力与钢球的重力相平衡,钢球悬浮在预设高度而处于平衡状态。为了得到一个稳定的平衡系统,设计模糊控制方案以实现闭环控制,使整个系统稳定具有一定的抗干扰能力。
(1)数学模型的建立
磁悬浮它本身结构并不复杂,但其控制系统是非线性的和滞后性的。所以,在建模时,必须要将他的物理模型简化,忽略掉一些干扰和影响小的因素。线性化后的模型有很多的优点。数学模型的建立的工作主要是对各个物理模型的推导,得到联合方程,再根据联合方程,线性化后得到系统的传递函数。
(2)硬件组成的设计
本课题使用的是GML1001型磁悬浮实验装置,装置组成电磁铁、LED 光源、光电源、电位置传感器、放大及补偿装置、数据采集卡和控制对象(钢球)等元件。该磁悬浮实验装置是一个典型的吸浮式悬浮系统。在此,本课题不需要重新设计,只需使用。
(3)控制方案的设计
1)模糊PID控制算法理论。学习模糊控制算法理论和PID控制的相关理论知识。
2)模糊PID控制器。模糊PID控制器分为两部分,一部分是PID初始参数的整定;另一部分是模糊控制器部分的设计。
(4)控制系统的仿真和实时控制
首先在Simulink中,建立系统的的仿真模型。然后系统给定单位阶跃,分别使用两种控制器对系统仿真,比较系统的动态性能和静态性能。
进入Simulink,打开实时控制工具箱“Googol Education products”(该工具箱为固高磁悬浮控制系统配套工具箱),利用其中的实时控制模块重新搭建实时控制的闭环系统。在磁悬浮控制系统中,使用模糊PID控制器。
系统搭建完成后,修改PID控制器的预置参数,输入电压给定并编译程序。编译程序之后,将程序与外部磁悬浮系统实验装置连接,并运行程序。程序运行后,将小球放在电磁铁附近,可以发现电磁铁有一定的吸引力。通过程序设定钢球的悬浮位置,运行程序,然后托住钢球放置到预设位置,钢球能够稳定悬浮。
2 磁悬浮系统的分析与建模
2.1 磁悬浮系统的分析
2.1.1 磁悬浮的硬件组成
本课题使用的是GML1001型磁悬浮实验装置,它是一个典型的控制实验设备,是研究磁悬浮技术的平台。该磁悬浮球控制系统适用于自动控制的学习和控制算法的研究。该系统电磁铁在上,钢球在下,是一个吸浮式系统,系统结构图见图 2.1。
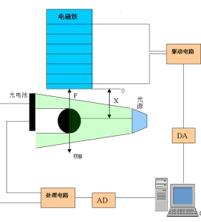
图2.1 磁悬浮系统结构图
如结构图所示,必须采用闭环控制,才能使系统平衡,且整个系统具有一定的抗干扰能力。在磁悬浮实验装置中,通过电流的电磁铁绕组中会产生高频电磁场[3],高频电磁场在金属表面产生的涡流能够实现金属球的悬浮,只需控制流过电磁铁绕组中的电流,就能控制金属球的悬浮高度。本系统中采用无接触测量装置,该装置有光源和光电位置传感器组成。光电位置传感器可以通过感光面积来反映悬浮高度x的变化,并且能够得到高度变化率。电磁铁中控制电流的大小可以作为磁悬浮控制系统的输入量。 磁悬浮系统的模糊控制器设计(3):http://www.751com.cn/zidonghua/lunwen_18040.html