
2 边缘检测方法讨论 sobel prewitt canny算子
2.1 边缘检测的意义
边缘检测是图像处理和模式识别的重要内容,是对图像信息进行提取和识别的基本方法。一方面,图像的边缘是图像产生物理模型,在物理世界中对象的重要特征,同时图像分割避免不了用到图像的边缘;另一方面,边缘检测能够降低图像处理所需要的数据量,方便图像特征提出和模式识别。图像的边缘是图像的基本特征。物体与物体、背景与物体等等之间都有着广泛的边缘。它的存在是灰度不连续造成的。就连最简单的一个物体它也包含着大量的外部特征,它在图像中就表现出不连续的强度。边缘检测是图像分析领域的基础,图像分析不可避免的用到图像边缘检测边缘检测, 同时也是图像识别中获得图像基本特征的一个重要内容。图像的分析处理首先就需要用到边缘检测, 目前它是机器视觉研究方面的热点之一, 在工程应用中起到了主导地位。正是因为边缘检测的重要性, 人们研究出了不同的边缘检测方法来满足人们对于不同情况下的要求。可是, 在实际图像处理过程中, 如何确保边缘检测的精度一直是个难题。例如对于一幅图像,他的变化范围尺度非常的宽,它对图像检测就构成了很大的难题。如果对每个图像进行独立的处理, 像素间的灰度级发生很大的变化。实际图像的边缘基本上都是是锐边的, 几个像素之间的陡变就反映了灰度的变化。另外有些边缘是模糊的, 它是由许多像素值慢慢变化造成其灰度的变化 ,所以必须针对这些不同的情况对图像处理进行分类。因此简简单单的一个算子是无法满足所有不同程度灰度变化要求的。于是人们才研究适用于不同灰度变化尺寸的算子。
2.2 边缘检测的基本步骤
1) 滤波:边缘检测算法基本都要求对图像强度进行一阶和二阶求导,但是噪声对导数计算的影响很大,因此需要用到滤波器来对受到噪声影响的边缘检测器进行优化,使其满足边缘检测的要求,需要注意的是,滤波器降低噪声大多会对边缘强度造成影响,所以需要权衡边缘增强和噪声降低之间的利弊,选择最优的方案。
2) 增强:边缘增强需要知道图像各点之间邻域强度的变化值。增强算法能够将邻域强度值有明显差异的点标注出来。边缘增强通常是利用算出梯度的幅值来实现的。
3) 检测:对于图像里梯度幅值比较大的点,恰好这些点所在的区域不属于边缘,这时应该通过某种方法检测出哪些点是边缘,哪些不是边缘点。边缘检测的基本判定是通过梯度幅值的阀值进行比较的。
4) 定位:检测出边缘还需要确定边缘的位置,通过边缘在子像素的分辨率来大致确定边缘的位置。
2.3 几种不同的边缘检测算法探究
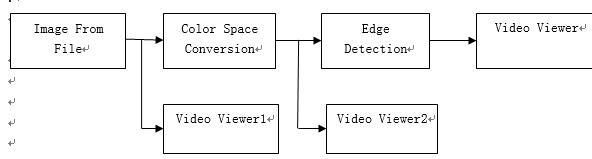
图2.1 图像边缘检测模型
物体的边缘在图像处理中就是灰度的不连续。边缘检测一般都是通过计算图像中每个像素邻域内灰度的变化,对边缘邻域进行一阶或二阶的求导,通过最简单的方法进行边缘检测,我们就称它为边缘检测局部算子。图像的不同,灰度自然也就不同,从而在边界处一定会出现显著的边缘,这种差异就可以用来进行图像分割。特别指出的是:边缘并不就是物体间的边界,在图像中像素值发生突变的地方就是边缘,而物体间的边界是指现实世界中物体之间的事实存在的边界。而在图像中只包含了基本的二文信息,三文到二文间的映射必然会导致信息的部分丢失;此外,光线、噪声都对图像处理的过程造成或多或少的影响。基于以上原因,基于边缘的图像分割是一个比较复杂的问题。 雨雾气候条件下车速检测技术研究(4):http://www.751com.cn/zidonghua/lunwen_11999.html