
第五章采用了半物理仿真实验的方法对设计的通讯软件进行仿真验证,验证了通讯软件的可行性。
2 传递对准通讯软件设计方案
2.1 传递对准基本原理
传递对准是指用主惯导系统(Master INs)的高精确度导航信息对子惯导系统(s1ave INs)进行初始对准的方法[15]。惯性导航系统是一种自主式导航系统,它结合由惯性传感器测量载体的角速度等信息和已给定的初始条件,实时推算速度、位置等参数。由于其采用推算的方法来定位,那么系统的误差就会随时间迅速累积,而该误差影响了系统的精确度。要降低这种误差,精确的初始对准是至关重要的。传递对准过程包括2个子过程:粗对准和精对准。粗对准时,子惯导利用主惯导的基准位置信息进行初始装订。传递对准滤波器对主子惯导的信息进行滤波计算。滤波计算后,估计出子惯导的误差值。将该误差值反馈到子惯导系统,修正子惯导姿态、速度、位置等信息,完成精对准过程。文献综述
2.2 传递对准系统总体通讯结构
2.2.1 系统总体通讯结构
该系统有三部分组成:主惯导系统、子惯导系统和监控系统。其中,主惯导系统将生成的导航信息按照约定的导航通讯协议发送给子惯导系统;子惯导系统是本系统的核心,它由子惯导、GPS接收机、子导航计算机PowerPC组成:子导航计算机一方面接收主惯导系统发来的主惯导数据;一方面接收子惯导数据,进行捷联惯导解算;然后进行主子惯导系统间的动基座传递对准,得到稳定平台的速度、姿态和位置信息,然后通过RS422通道发送给监控系统;GPS接收机主要负责子导航计算机内部时钟授时和主子惯导间的时间同步;监控系统主要接收从子导航计算机发送来的数据,并实时显示出来。该系统通讯结构框图如图2.1所示:
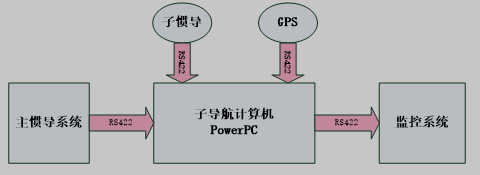
图2.1 系统通讯结构框图
2.2.2 通讯软件设计
如图2.1所示,吊舱在传递对准过程中,其实时性及精确性需要良好的通讯软件做基础。在传递对准系统总体结构中,子惯导数据5ms更新一次,主惯导数据25ms更新一次,本文利用3路422串口设计了系统底层通讯软件,如该图的红色部分所示,实现以下功能:
(1)子导航计算机PowerPC读取主惯导系统发来的数据并解包;
(2)子导航计算机PowerPC读取子惯导数据并解包,并用主惯导信息对子惯导进行传递对准;
(3)子导航计算机PowerPC读取GPS数据,从中解出收星数,获得GPS秒时间,用于系统授时;
(4)将子导航计算机数据融合后的信息按照约定的通讯协议打包发送至监控系统中,完成数据的发送。
VxWorks嵌入式军用瞄准吊舱传递对准通讯软件的设计(3):http://www.751com.cn/tongxin/lunwen_72881.html