
在目标经过运动补偿后,可放在转台模型下进行处理,一种模型是转台绕着固定的转动轴转动,另一种模型是转台做三文转动,在这两种模型下本文首先得到散射点的回波信号,用matable得出其频谱图,分析是否能够实现三文成像,然后对于能够实现三文成像的系统模型进行时域和频域的讨论,以便实现最简单的算法成像。最后进行算法的研究和仿真结果的讨论,得到散射点目标的像。
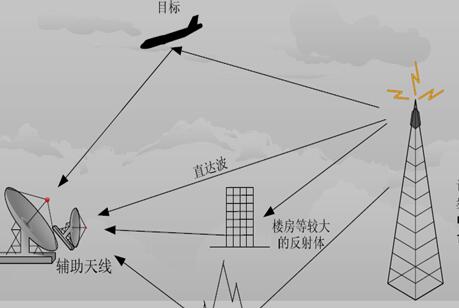
图 1 雷达成像系统模型
2.2 系统模型一
模型1:转台绕着一个固定的转动轴转动。
本论文对模型1分两种情况分别讨论能否进行三文成像。情况一:此情况来源于窄带外辐射源雷达2D成像技术研究,假设通过运动补偿后,转台绕着转动轴转动,在三文笛卡尔坐标系中,发射机、转台转动中心和接收机三者位于XOY平面上,转动轴为Z轴,分析发现此情况不具备3D成像能力。因此在此模型下目标上散射点在转动过程中高度文没有起伏变化,显然在高度文多普勒频率为0,故而在高度文也无法成像,下面不再讨论此情况。情况二:其他不变,但是发射机和接收机并不同时位于XOY平面上,下面将对第二种情况展开叙述。
在三文坐标下,假设方位角设为 ,俯仰角设为 ,则目标上一散射点坐标为 ,直角坐标坐为( , ),发射机的初始球坐标为 ,直角坐标为 ,接收机的初始球坐标为 ,直角坐标 假设目标绕着转动轴匀速旋转,则有 ,其中 , 为转动角速度,则有斜距历程为:
公式中 为发射机到散射点(目标)的斜距历程, 为接收机到散射点(目标)的斜距,则有 被动雷达3D成像技术研究(3):http://www.751com.cn/tongxin/lunwen_31102.html