
免测距定位算法的期望最大可达准确率的下界在Nagpal et al ,2003 中被提出。这篇文章中的下界已经被大量引用,而且通过Hu and Evans,2004得到了拓展。并且在这两篇论文之后,S.Maclean and S.Datta,2008提出了针对Nagpal下界而改正的新的更为精确严谨的下界。我们将对上述关键的两个下界的悖论处进行论证,进而提出我们的优化下界。最后通过MATLAB仿真论证我们的下界确实为更加精确实际的下界,对原始的Nagpal的下界进行了优化改进。
论文先介绍了目前的定位算法,分别从非免测距、免测距两个角度讲述。论文进一步研究了免测距定位算法的现有的通用下界。论文的第三章重点讲解我们对Nagpal的分辨率下界的优化计算。最后论文的第四章我们采用MATLAB对第三章的优化下界进行仿真并对仿真结果进行物理解释。
2 免测距定位技术及其误差下界
本章节在讲解免测距定位算法之前,我们将介绍部分现流行的非免测距定位技术,从而在性能比较之上引出免测距定位算法。针对性地介绍完几种免测距定位算法之后,我们介绍该类算法的已经被研究过的通用下界。
2.1 现行非免测距定位技术
传感网络的非免测距定位算法的基本概念是通过利用小部分已知位置的锚点(called anchors)的位置信息以及节点间测量技术(例如测距和测方位)来估算那些最初位置未知的传感点(non-anchors)的位置[1]。该类算法使用广泛,对节点间的测量技术要求甚高。
2.1.1 基于角度测量(AOA)的定位技术
角度测量技术可以被细化为基于接收天线幅度响应的角度测量和基于接收天线频率响应的角度测量。基于接收天线幅度响应的角度测量乃是利用接收天线各向异性的波束成型。一个典型的各向异性的天线的波束模型如图2.1所示:
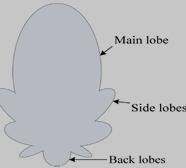
图2.1 一个典型各向异性的水平天线模型
接受天线的波束经电子化或者机械化的旋转从而接受信号的最大信号强度的方向被认作信号发射者的方向。而当传输信号强度变化的时候,此类方法就要进行改进,因为接收天线无法区分信号强度的变化是来自发射信号的变化还是由于接收模式的各向异性造成的。解决这个问题的方法是采用第二个不旋转且全方向的接收天线。利用后者的信号将前者归一化处理,那么信号强度变化造成的影响就会大大减小。
基于接收天线频率响应的角度测量乃是利用接收天线之间的相位差来判断发射器的方向。典型的接收方为一个超大天线或者一个天线阵。图2.2展示的就是拥有N个天线的天线阵。
由N个天线因子组成的天线阵
相邻的天线因子以固定的距离d分开,那么一个距离天线阵较远的发射器到第i个天线因子的距离可以估算为:
(2.1)
其中 是发射器到第0个天线因子的距离,θ为发射器相对于天线阵的方位。因此,相邻的天线因子收到的发射器信号有 的相位差,利用这个相位差我们可以获得发射器相对于天线阵的方位。此类方法因高信噪比而广为使用,但是它的缺点在于面对多通道干涉或者多径效应产生的误差。
来自上述的两个方法我们获得了发射器相对于接收天线的角度,进而利用获得的角度数据进行定位。在不考虑噪音和干涉的提下,两条及其以上的方位线之间的交集便可以确定发射器的位置,即发射器的位置估计。考虑噪声的时候,更多的接收器被集中来估测精确的定位。 物联网免测距定位技术的定位误差下界分析(2):http://www.751com.cn/tongxin/lunwen_30071.html