
该磁流变作动器的简明图解如图2.1(a)所示。与磁轭连接的壳体中包含螺线管、柱塞、弹簧以及磁流变液。螺线管线圈磁轭周围的壳体底部相连,锥形柱塞放置在螺线管线圈内。壳体隔板和壳体盖与壳体顶部相连,接触片被固定在柱塞上部。由于装有倾斜磁轭的壳体、锥形柱塞以及壳体盖都是由铁磁材料制成,这些部件引导由螺线管线圈产生的磁场从而形成闭合磁路。壳体中包含磁流变液,这些液体在受到活塞向下运动造成的挤压时会流入磁轭和柱塞之间的间隙。
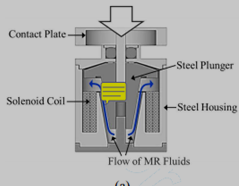
(a)小型磁流变作动器剖面特征图
(b)力分布随电流变化图
当使用者按下磁流变作动器按钮,磁流变液受挤压而在磁轭和柱塞之间的倾斜空隙中向上运动。螺线管通电后,磁流变液由于受磁场作用而发生相变,在倾斜空隙中形成粒子链,这些磁流变液粒子链之间会产生挤压、流动和剪切应力,并且通过接触片以阻力形式向使用者传递。该设计中的小型磁流变作动器的作用即为在给定作动器尺寸中整合磁流变液的多种操作模式,使作动器最终产生的作为触觉反馈的阻力最大化。
试验中构建了一个磁流变作动器的原型,该作动器外形为一直径10毫米,高度14毫米的圆柱体,作动器总行程为1毫米。图2.1(b)简单表示了作动器的按压深度和产生触觉力反馈之间的关系,更详细的设计及实验结果可以参阅Yang在2012年发表的研究报告。如图所示,在整个1毫米的行程中,阻力随着流入电流的增加而增加。图示进一步说明,最大阻力的变化范围为1.5N(0V或无输入电流)到16.2N(5V,360mA),其中最大阻力对应1mm压入深度,即作动器按钮被完全压下的情况。这样的力足以向使用者传递足够的触觉反馈。另外,基于最小可区分标准也即人体对于外力变化的最小差分阈值,小型磁流变作动器还能够在小行程内产生多种级别的动觉感受或阻力。
为了利用上述作动器展现真实世界的触觉感受,应当设计一种采用有效驱动和感应的方法的控制系统。换言之,为了在输入动作的基础上控制输出驱动力(或阻力),该作动器应当包括一套有效的传感方案。因此,磁流变作动器的按压深度可以通过作动器中的螺线管线圈的阻抗变化来测量。其阻抗变化以电压形式表示,如图2.2(a)所示。该图比较了从最初作动器未被按下到最终按钮被完全按下的状态过程中的电压信号变化。当使用者按下作动器接触片,柱塞和壳体之间的空隙减小,从而增加了作动器的磁导率μ,进而增大了螺线管线圈的电感L。电感L的增加导致了如图2.2(a)所示的输出电压增加。频率为ω的交变电压被施加于螺线管线圈上,用以提供变化的磁场。
图2.2(b)所示为设计中的感应方法的概念电路。如图所示,输入电压信号由两种频率明显不同的信号混合而成从而同时实现了触觉作动器的驱动和感应功能。低频信号用于调节输出的驱动力,高频小幅信号用于感应作动器行程。磁流变作动器可以被建模为电阻和电感的混合物,记为Rsol和Lsol。如图2.2(b)所示,输出感应信号Vout为作动器电阻和电感上电压。
基于磁流变弹性体技术的触觉传感作动器的设计与分析(8):http://www.751com.cn/jixie/lunwen_70120.html