
在上述两种产业中,硅片和液晶面板的夹持和搬运方式与产品质量有着非常紧密的关系,是影响产品经济利益的关键因素。传统的接触式搬运技术由于搬运机构必须与工件表面接触而会产生表面微小划伤、微杂质或静电污染,不能满足产品质量需求,因此实际应用迫切需求新的非接触式搬运技术。
1.2 非接触式搬运的研究现状
1.2.1 磁力悬浮
1.2.2 静电悬浮
1.2.3 光学悬浮
1.2.4 超声波悬浮
1.2.5 空气动力学悬浮
1.2.5.1 空气悬浮式
1.2.5.2 空气吸浮式
1.3 课题研究内容
1.3.1 空气吸附式机构的工作原理
空气吸附式非接触技术是将压缩空气通过进气孔进入搬运器腔体,形成近似真空,通过吸附机构与下方工件间的间隙将空气排出,形成对工件的吸附力,吸附力与工件自重达到平衡实现非接触式的向上吸附。产生真空的方式主要有基于贝努利效应的吸附机构(图1.9)和旋回流式的吸附机构(图1.10)。本文主要研究旋回流式。
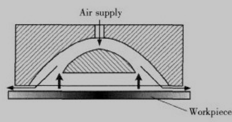
图1.9基于贝努利效应的吸附机构图 图1.10利用旋回流的吸附机构
旋回流式吸附机构的进气孔是在吸盘顶部沿切线方向通入工作区域,压缩空气进入后,在圆柱形腔体内形成漩涡流,空气在腔体内高速旋转,由于离心力的作用中心区域的空气被甩至腔壁,在中心区域形成类似真空的负压区,从而实现搬运装置的吸附功能。另外工件的半径必须大于搬运器腔体的半径以防工件被吸入搬运器。腔体内被甩至腔壁的空气将沿着搬运器与工件间的微小间隙缓慢排除。吸盘原理如图1.11所示。
气旋式非接触真空吸盘原理示意图
1.3.2 吸取搬运过程的研究
工件的吸取
搬运器通入气体后,当达到与工件所需的气膜间隙时,搬运器吸取工件,在吸取的瞬间,可能会出现轻微振荡或吸取失败的现象。也就是工件不稳定的现象。分析原因:(1)刚刚开机,搬运器内旋回流形成后还不稳定;(2)工件受吸力的作用点与工件重力作用点不重合,工件受力不平衡;(3)搬运器尚未吸附工件,搬运器就已经回升离开工件导致吸附式不成功。
上下搬运过程
在上下搬运过程中,若匀速运动,一般不会出现问题。若加速上升或加速下降,则可能会出现轻微振动。加速过大时甚至可致工件掉落。分析原因是加速上升或下降的惯性力破坏了搬运器与工件间的平衡。
水平搬运过程
水平搬运过程匀速进行比较平稳。若加速运动则可能破环搬运器与工件间的气膜间隙从而导致工件的掉落。
工件的释放
在工件到达指定位置上方时,要等工件到达准确位置后再停止供气,若过早断气可能会砸坏工件。
2 气动系统设计
2.1 搬运系统的功能要求初步分析
本课题中,要求搬运系统能将工件在四个位置间搬运,吸盘需要上下前后左右的运动,搬运物体的间距为25 35mm。所以该搬运系统需要实现对工件的非接触式吸取,竖直、水平方向的搬运。可以选用
三个独立的气缸分别完成X方向、Y方向、Z方向的运动。而吸盘需要完成吸取和释放工件的动作,故而要为吸盘设计单独的供气回路。吸盘是非接触式的,为了防止工件偏移中心,要为吸盘加上挡板,防止工件侧落。 solidworks非接触式搬运系统的结构设计(2):http://www.751com.cn/jixie/lunwen_70100.html