
国内外学术界和工程界对研究和开发并联机床都非常重视。1994年在芝加哥国际机床博览会(IMTS’94)上首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心并引起了轰动。此后,各主要工业国家都投入了大量的人力和物力进行并联机床的研究与开发。
我国已在国家“九五”科技攻关计划和“863”高技术发展计划中对并联机床的研究与开发予以支持。中国科学院沈阳自动化研究所、清华大学、天津大学、哈尔滨工业大学、东北大学、河北工业大学等单位的研究人员也在积极从事并联机床领域的研究工作,并与相关企业合作研制了数台结构形式各异的样机。
中国处在改革开放的关键时期,各行各业正是在高速发展的黄金阶段,高新技术产业更是朝气蓬勃。市场的快速发展带来了绝佳的研究机遇,因此,我以为在我国全面建设小康社会、大力发展现代化工业同时,机器人是个不可避免的话题。在我国进入老龄化社会,劳动力逐渐短缺之际,传统工业中大量危险和重复性高的工作必将由越来越多的机器人来代替。但相对外国的机器强国而言,我国的机器基础较为薄弱,机器人技术的发展水平还相对较低,难以应对发展大潮。Delta机器人,作为机器人行业中的佼佼者,具有很高的研究价值和解决中国实际的现实价值。
1.2 相关技术研究的现状分析
1.3 发展趋势
2.1 并联机器人机构方案的拟定
本并联机器人的机构设计指标是:并联机器人机构采用三臂结合,单臂臂长1m,摆动半径小于400mm,摆动角速度40rad/s,摆动精度0.1°,连续工作时间不小于8小时,负载5kg,采用三电机控制,不能出现死顶现象。
(1)电动机输出的转矩经ZLP减速器后,通过联轴器传递给主动杆
(2)主动杆与从动杆、从动杆与动平台之间用球副进行连接
并联机器人机构方案图如下:
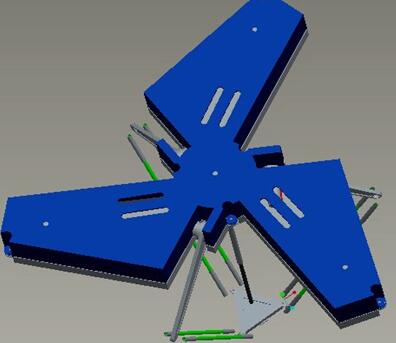
图2.1 并联机器人机构方案图
2.2 并联机器人总的装配图
图2.2 并联机器人总的装配图
图2.3 并联机器人总的装配图
2.3 并联机器人静平台的设计
静平台采用成 角轴对称的风扇叶片结构,为了能够方便准确的定位与之相连的轴,静平台采用上下盖的形式,用螺栓进行连接。下底开有通孔,用来固定电机和减速器。下盖的侧面也有通孔,是用来安装摄像头,通过摄像头分辨物体和机械手的位置,并将其坐标传送给控制系统,再由控制系统控制步进电机运转,从而控制机械手实现抓取物体和旋转物体。上盖上同时开有通孔和通风孔,通孔是用来进行悬挂固定的,通风孔是用来对电机进行通风散热的
delta并联机器人机构设计(3):http://www.751com.cn/jixie/lunwen_69632.html