
仿生学的任务就是要研究生物系统的优异能力及产生的原理,并把它模型化,然后应用这些原理去设计和制造新的技术设备,为人类提供最可靠、最灵活、最高效、最经济的接近于生物系统的技术系统,为人类造福。仿生学的主要研究方法就是提出模型,进行模拟,研究范围主要包括:力学仿生、分子仿生、能量仿生、信息与控制仿生等。
由于机器人的系统结构与生物体存在着很多共同特征,仿生学很自然地成为机器人研究的一个重要手段,仿生机器人也层出不穷。以其生物学方面的特性在工程上发挥着巨大作用,同时也为生物学的研究提供了有力的实验平台。比如目前人类根据蝙蝠的喉咙、耳朵研制出了雷达,根据鸟类的翅膀研制出了飞机机翼等。
1.2 机器人的定义与分类
机器人的定义是随着机器人技术的发展而变化的,从古代人们设想有替人干活的木偶到目前已经在科学史上创造下无数辉煌的各种各样的现代机器人,人类的梦想已经变成了现实。从简单的工业机械手到智能机器人,机器人技术的发展也无疑带动了新一代的科学技术革命。
1.2.1 机器人的定义
机器人的英文名词是 Robot。Robot 一词最早出现在 1920 年捷克作家卡雷尔·卡佩克(Karel Capek)所写的剧本《罗萨姆的万能机器人(Rossum’s Universal Robots)》中。剧中把人造劳动者取名为 Robota,捷克语的意思是“苦力”、“奴隶”。英语的 Robot一词就是由此而来的,以后世界各国都用 Robot 作为机器人的代名词。顾名思义,机器人的出现就是用来代替人类劳动者,执行那些需要精确性高,同时又具有重复性的工作任务。它体现了人类长期以来的一种愿望,即创造出一种像人一样的机器或人造人,以便能够代替人去进行各种工作。国际上针对机器人有不同的定义,一般地说,机器人可以定义为:由程序控制的,具有人或者生物的某些功能,可以代替人进行工作的机器。经过人类几十年的探索与研制,机器人已经由幻想变成了现实。
一个机器人系统一般由图 1-1 所示的几个部分组成,即控制器、传感器、驱动装置和执行机构。
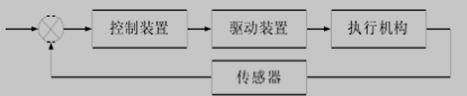
图1-1 机器人的系统组成图
控制器:是机器人的核心,是机器人软件控制的载体,它负责对机器人的运动和各种动作控制及对环境的识别。现代工业机器人的控制器都是由计算机控制系统组成,控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。
传感器:是机器人获取环境信息的工具,如视觉、听觉、嗅觉、触觉、力觉、滑觉和接近觉传感器等,实现外界环境信息的获取。
驱动和传动装置:用来有效地驱动执行机构的装置,通常采用液压、电动和汽动,有直接驱动和间接驱动二种方式。
执行机构:机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完成某项任务所必不可少的组成部分。
1.2.2 机器人的分类源[自[751^`论`文]网·www.751com.cn/
根据机器人的发展和用途,机器人分为以下三类:
(1) 示教再现型机器人。第一代机器人出现在二十世纪五十年代,没有安装任何传感器,对外界没有感知能力。机器人的作业路径、运动参数需要操作者手把手示教或者通过编制程序来设定,机器人重复再现示教的内容。目前商品化、实用化的机器人大多是此类机器人,如工业机器手。 STM32六足仿生小机器人及其测试系统的开发(2):http://www.751com.cn/jixie/lunwen_69266.html