
2.2机械手总体方案设计
目前工业中使用的机械手,大都已经趋向于发展为工业机器人,大多由被控机体(机械本体)、控制器、伺服驱动系统和检测传感反馈装置组成,是一种较为复杂的机电一体化生产设备.而在本设计中所使用的机械手也是由这几部分组成,其中的主要部分为机械本体,也是重点研究对象.
通过分析其他类型的上料机械手,本设计中机械手的结构设计主要分为2个部分:手部部分和主体部分.手部部分主要用于取放零件,主体部分主要作用是控制机械手的升降和旋转,同时负责零件的定位。
2.3课题功能需求分析
2.3.1上料机械手的组成
上料机械手主要是由如图所示的几个部分组成,即控制系统,驱动系统,执行机构以及传感检测反馈装置等等组成的,各系统相互之间的关系如下:
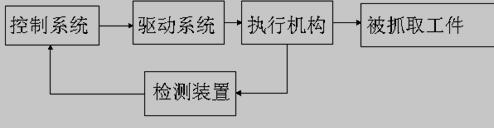
图2-1 上料机械手系统示意图
2.3.2机械结构分析
回转式数控多工位运输机上料机械手的设计目的是为了能够在垂直升降的同时在水平方向具有多工位多角度工作的功能,可以完成抓取物料,升降,旋转等过程,能大大节省时间。本课题设计的回转式数控多工位运输机上料机械手设计如下:
本系统能实现的功能:
工作台上物体位置检测功能;升降机构升降检测功能;旋转机构旋转检测功能;机械手自动升降和旋转;物体夹紧放松;
传动机构设计:
机械手升降机构的传动装置是通过滚珠丝杠螺母副和直线导轨副传动,滚珠丝杠螺母副传动不但具有螺旋传动的一般特征(即降速传动比大以及牵引力大)外,还具有下列特性:
传动效率高;定位精度高;传动可逆;使用寿命长;同步性能好;使用可靠;润滑和维修方便;不能自锁。
机械手旋转机构选用涡轮蜗杆减速器和凸轮分割器实现传动,使得旋转工作台可以稳定准确的旋转 ;
手抓机构使用电磁阀来控制,将电磁阀与真空泵连接,并通过控制器控制电磁阀的开闭,从而在手抓吸盘中吸气或放气,当吸盘内气压低于大气压将形成真空从而吸附住物料,达到抓取物料的目的,而当气压大于大气压是则将物料释放,完成机械手抓取放物料的动作。 回转式数控多工位运输机上料机械手系统设计+CAD图纸(3):http://www.751com.cn/jixie/lunwen_47668.html