
自从研发可修正弹道的炮弹出现,最开始是一文修正,发展至今天的二文修正弹[5]。二文,顾名思义是至在两个文度,即俯仰和偏航。二文修正的原理是:弹道的理论轨迹由主控系统根据目标的位置计算得出,导航系统对弹道的实际轨迹进行实时监测。并将实际轨迹与理论轨迹相比较,计算偏差。指令系统在需要修正弹道时发出指令,从偏航和俯仰两个方向对弹丸进行弹道修正,达到精确制导的目的,实现高效打击目标[6]。二文修正弹与一文修正弹相比,二文修正弹不仅可以修正弹丸飞行的远近,更加重要的是能够改变弹丸的侧向飞行方向。为了实现对弹丸的偏航修正,需要有改变航向的侧向力。目前用于提供侧向力的方式有舵机和脉冲矢量发动机两种[7]。舵机是在修正弹上安装舵翼,主控系统发出的信号对舵翼的姿态进行控制,利用空气对其产生的气动力改变弹丸飞行的速度和方向。目前舵机修正弹被广泛的应用,国内的学者也对其重视并在这反面进行了许多研究[8]。
对二文修正弹的研究是世界各国用于提高精确打击能力的重要方式之一,而利用简单可靠的鸭舵式修正结构把原来的常规弹丸改造成能精确制导的智能弹药是很有前景的。双旋弹丸是同过利用相对转速控制舵翼相对地面姿态的控制而达到控制弹丸弹道的目的。如图1.1所示,双旋弹丸的结构为安装舵翼的前体和弹丸的主要部分后体组成,两部分通过滚动轴承连接,在飞行过程中以相反方向的转速转动,以保证舵机相对地面的姿态稳定,顾称之为“双旋”。 双旋弹丸的相对运动靠连接做相对运动的两部分之间的电机实现相对转动。其中舵翼部分相对地面的姿态是根据弹丸的预定运动轨迹而定的。在弹丸发射后,通过传感器对弹丸的实时姿态进行检测并反馈给控制器,控制器发出相应的指令使双旋电机的速度产生相应的变化从而改变舵翼部分相对地面的姿态的变化进而达到制导的作用。
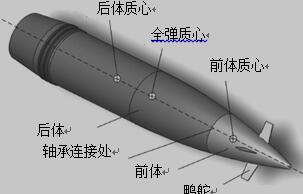
图1.1 鸭式布局双旋弹结构示意图
舵机系统根据动力的不同可以分为四类:液压式、气压式、电磁式和电动式舵机。应用比较多的是液压式、电动式和电磁式三种,且都已经成功的在实弹上应用。电动舵机以自带的电动机为动力带动舵翼装置与后体做相反方向的转动,主要是调节舵翼相对地面的姿态。与其他类型的舵机相比,电动舵机:响应速度相对较快,易于装弹,结构和工艺相对简单,可靠性高,精度好,易于构成闭环系统[9]。
1.2 本文研究的内容
(1)建立双旋弹丸转速控制模型,设计弹体转速模型和电机安装装置;
(2)编写闭环转速控制程序,要求控制响应时间小于5s;
(3)在试验台上进行转速控制试验。
2 驱动电机及供电电源的选择
2.1 电机以及电源基本参数要求
根据弹体飞行的参数以及舵翼的结构可以确定电机需要满足的参数为:
(1)电机功率 Pd>50W;
(2)电机额定扭矩为:0.2~0.3N•M;
(3)电机最大尺寸为:φ40×30mm;
(4)电池最大尺寸为:φ42×40mm。
2.2 电机的选择
由电机的要求参数可知,要求的电机需要小体积大功率。在对比了几种电机后选择步进电机和直流电机作为待选电机。对这两种电机进行对比比较,并选择最终的执行电机。 STM32双旋弹丸转速控制系统研究(2):http://www.751com.cn/jixie/lunwen_27486.html