
(6) 设计具有多自由度的手爪,能够完成简单的开关门窗任务。
(7) 为降低成本,考虑到目前为单件小批量生产,尽量在设计过程中采用市场已有的型材进行加工。
2.1.2 家庭服务机器人各部分功能设计
图2.1为家庭服务机器人设计功能说明图。
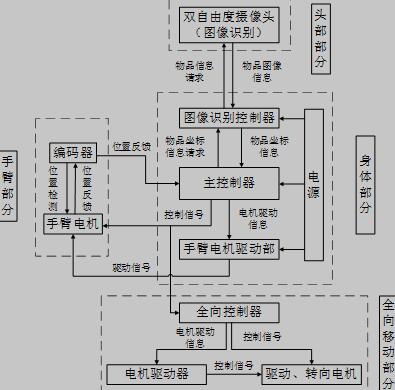
图2.1 家庭服务机器人设计功能说明图
如上图所述,本文涉及的家庭服务机器人总要包含四个部分:身体部分、头部部分、手臂部分以及全向移动部分。
其中身体部分为主要控制部分,其中包括了电源、图像识别控制器、主控制器以及手臂电机驱动部。其中主控制器为整个机器人控制的核心,负责处理物品坐标信息、运动至物体位置以及控制物品抓取等任务;图像识别控制器主要接收主控制器的物品坐标请求,再向头部发送请求信息后接收头部发送的物品信息再传送给主控制器;手臂电机驱动部主要集合了手臂电机的驱动器;电源负责给整个机器人系统供电。
头部部分为物体识别部分,主要设备是摄像头。该摄像头能够进行俯仰以及转动两自由度运动,负责在接收到图像识别控制器的物品信息请求后寻找物体具体方位并向图像识别控制器发送坐标信息。
手臂部分是抓取物体的主要部分。其全部动作由主控制器直接或者通过驱动器间接控制完成。手臂前端装有手爪进行抓取,在姿态调整过程中,手臂上装有编码器,不断向主控制器反馈转动角度,让主控制器能够精确控制手臂末端位置。
全向移动部分主要负责运动,在主控制器的指令下完成机器人方位的调整,以让机器人在合适的位置进行物品抓取。其上装有全向控制器进行主控制器发送电机方位的处理任务,将此信息转换为电机驱动信号进行电机驱动。全向移动部分设计与身体控制部分的接口,能够与机器人主体部分进行组装。
2.1.3 家庭服务机器人各部分尺寸及重量设计
图2.2为家庭服务机器人尺寸说明图。
图2.2 家庭服务机器人尺寸说明图(mm)
从上图可以看到本文涉及的家庭服务机器人各部分的设计尺寸。以下结合上图具体阐述该机器人的尺寸及重量设计。
全向移动部分:为了后续安装传感器以及角度的不区分性设计成圆形,其最大圆周尺寸范围为 ;并且为了降低整体机器人的重心,防止机器人在使用过程中发生倾覆,其高度控制在 ,并要求全向移动部分重量在20kg左右,占整体机器人重量的40%。
机器人身体部分:为了保证整体设计协调,参考黄金比例设计保持身体和底盘比例约等于1∶0.618,设计范围要求其高度在550mm-600mm之间;为使外边不能超出底盘的主体圆周部分并留出足够空间安放控制器、驱动器以及电源,其横截面的尺寸早 的正方形区域内;其设计重量为8kg左右(不包括控制器、驱动器以及电源重量)。
机器手臂部分:设计参考了人的身体和手臂的比例大约在1:1左右,因此设计手臂自然下垂的高度在 之间;手臂部分设计重量在4kg左右,并尽量保持轻便,防止手臂动作过程中机器人倾覆
机器人头部部分:为了保持整体比例协调性,设计机器人头部高度在 之间,其横截面为 的圆。
2.2 全向移动机构的总体设计
2.2.1 全向移动机构具体设计要求
(1) 全向式移动机构的机械设计,满足承载60kg左右的要求,并且具有较高的地面适应性以及通用性;
(2) 全向式移动机构的简单控制电路设计,要求运用单片机设计电路能够处理主控制器信号并提供电机控制信号。 全向移动式家用服务机器人全向移动机构设计与运动控制(4):http://www.751com.cn/jixie/lunwen_25551.html