
说到机器人视觉(Robot Vision)就要提到另外一个概念:计算机视觉。计算机视觉(Computer Vision)是指把计算机和摄像机看成人脑和人眼,对外界的环境信息跟踪、识别和测量等。不完善性和多样性是计算机视觉的主要特点。
如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95%的工业应用扩展到更多领域的非工业应用。像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人。机器人应用无限制,只要能想到的,就可以去创造实现; 纵向上,机器人的种类会越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小;机器人智能化得到加强,机器人会更加聪明。文献综述
随着摄像机的精度不断的提高,使用视觉导航就能很好的达到导航要求。在2005年,Dilan Amarasinghe[9]开发了一款基于视觉的自主对接的混合控制策略移动机器人。在系统中,他提出了一种新的混合控制方案用来解决图像平面测量问题,对接机器人使用的是单目视觉系统,对接站设计了一个图像标记,以便通过单目视觉对对接站进行定位。该对接系统包括两个部分:对接站和对接机器人,整个对接系统如图1.1所示。
图1.1 对接系统整体图
在2006年,由Uri Kartoun[10]开发的基于视觉的移动机器人自对接系统,该系统包括两部分:对接站(图1.2),机器人平台(图1.3)。机器人平台上包括了一个摄像机,一台计算机和机器人车体。机器人把摄像机采集的信息传输到计算机中,在计算机中对传输过来的图像进行处理,计算出机器人的运动轨迹,向机器人发送运动命令。通过视觉导航,使机器人移动到对接站的前方完成对接。来.自/751论|文-网www.751com.cn/
1.3研究内容
1)首先根据本课题的要求以及要完成的任务,合理设计出一个对接系统,包括对接站和对接机器人。
(2)摄像机的标定
通过棋盘格的标定板进行离线标定,获得摄像机的焦距、光线投影坐标、摄像头畸变系数等的参数,为单目测距打好基础。
(3)对接站图像处理
基于HSI颜色模型进行分割,并提出了新的分割策略;使用简化的Canny算子对轮廓进行提取。
(4)目标识别和单目视觉测距
使用改进的模板匹配方法对目标进行识别;根据立体几何以及透视投影的相关知识,利用标示圆的形状约束推导出测距算法。
(5)机器人控制及路径规划
把机器人视野分为三个区,根据目标所在的视野区和测距所得到数据对机器人进行控制。将机器人运动过程分为以下几个环节:
1) 搜索对接站
2) 对对接站进行定位
3) 根据所在视野区和测距数据调整机器人的位置
总体来讲,就是需要对图形处理算法和机器人的控制这两个方面进行深入的研究,最终搭建出一个移动机器人对接系统。
2 本文对接系统总体设计
2.1 对接系统的结构
本章首先设计了机器人对接系统的总体方案,并根据对接系统总体方案的要求,为后面的图像处理、对接站搜索以及完成对接任务提供了基础。机器人对接系统结构如图2.1所示。
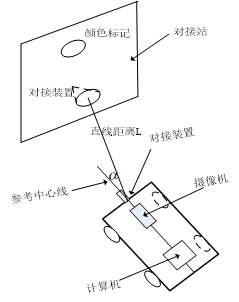
图2.1 机器人对接系统结构图
根据以上概念,本课题设计了一个合理的对接系统。该系统包括三部分:对接站、移动机器人本体和车载PC机。
对接站在机器人对接系统中是一个重要的组成部分,对接站设计的好坏直接影响到移动机器人对对接站的识别和对接的进行,进而影响到对接的成功率。 HSI机器视觉的两自由度机器人对接技术研究(3):http://www.751com.cn/jisuanji/lunwen_73565.html